 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent Cooperative Behavior in Distributed Target Tracking with Unknown Occlusions
Apr 21, 2023



Tracking multiple moving objects of interest (OOI) with multiple robot systems (MRS) has been addressed by active sensing that maintains a shared belief of OOIs and plans the motion of robots to maximize the information quality. Mobility of robots enables the behavior of pursuing better visibility, which is constrained by sensor field of view (FoV) and occlusion objects. We first extend prior work to detect, maintain and share occlusion information explicitly, allowing us to generate occlusion-aware planning even if a priori semantic occlusion information is unavailable. The efficacy of active sensing approaches is often evaluated according to estimation error and information gain metrics. However, these metrics do not directly explain the level of cooperative behavior engendered by the active sensing algorithms. Next, we extract different emergent cooperative behaviors that stem from the same underlying algorithms but manifest differently under differing scenarios. In particular, we highlight and demonstrate three emergent behavior patterns in active sensing MRS: (i) Change of tracking responsibility between agents when tracking trajectories with divergent directions or due to a re-allocation of the resource among heterogeneous agents; (ii) Awareness of occlusions to a trajectory and temporal leave-and-return of the sensing agent; (iii) Sharing of local occlusion objects in MRS that subsequently improves the awareness of occlusion.
SMA-NBO: A Sequential Multi-Agent Planning with Nominal Belief-State Optimization in Target Tracking
Mar 03, 2022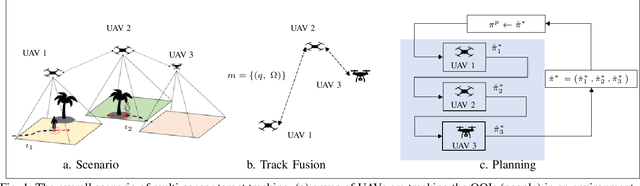
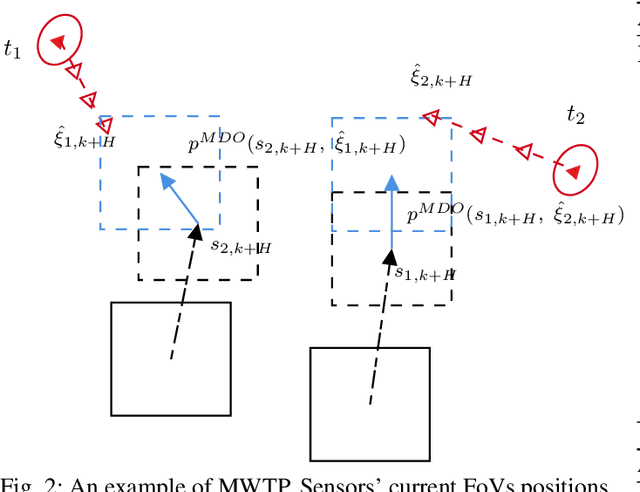
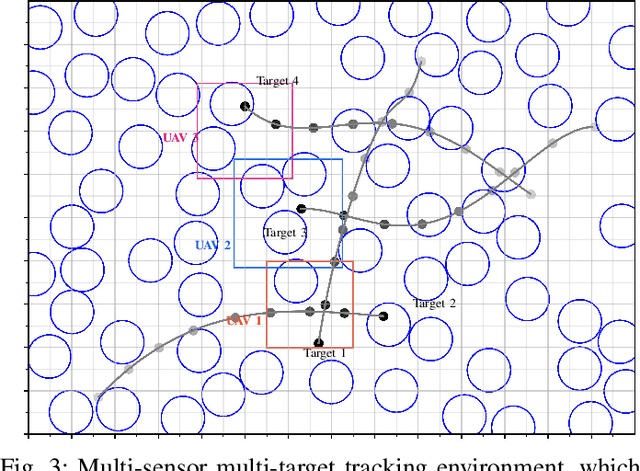
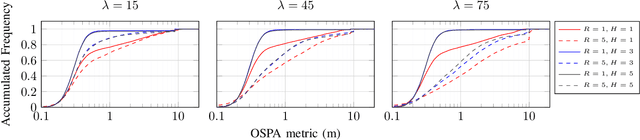
In target tracking with mobile multi-sensor systems, sensor deployment impacts the observation capabilities and the resulting state estimation quality. Based on a partially observable Markov decision process (POMDP) formulation comprised of the observable sensor dynamics, unobservable target states, and accompanying observation laws, we present a distributed information-driven solution approach to the multi-agent target tracking problem, namely, sequential multi-agent nominal belief-state optimization (SMA-NBO). SMA-NBO seeks to minimize the expected tracking error via receding horizon control including a heuristic expected cost-to-go (HECTG). SMA-NBO incorporates a computationally efficient approximation of the target belief-state over the horizon. The agent-by-agent decision-making is capable of leveraging on-board (edge) compute for selecting (sub-optimal) target-tracking maneuvers exhibiting non-myopic cooperative fleet behavior. The optimization problem explicitly incorporates semantic information defining target occlusions from a world model. To illustrate the efficacy of our approach, a random occlusion forest environment is simulated. SMA-NBO is compared to other baseline approaches. The simulation results show SMA-NBO 1) maintains tracking performance and reduces the computational cost by replacing the calculation of the expected target trajectory with a single sample trajectory based on maximum a posteriori estimation; 2) generates cooperative fleet decision by sequentially optimizing single-agent policy with efficient usage of other agents' policy of intent; 3) aptly incorporates the multiple weighted trace penalty (MWTP) HECTG, which improves tracking performance with a computationally efficient heuristic.