 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRL-based Variable Horizon Model Predictive Control of Multi-Robot Systems using Versatile On-Demand Collision Avoidance
Aug 14, 2023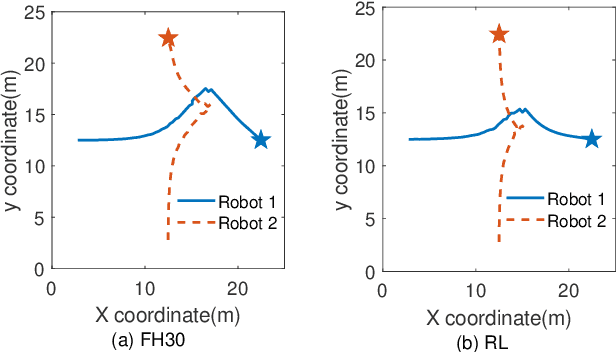
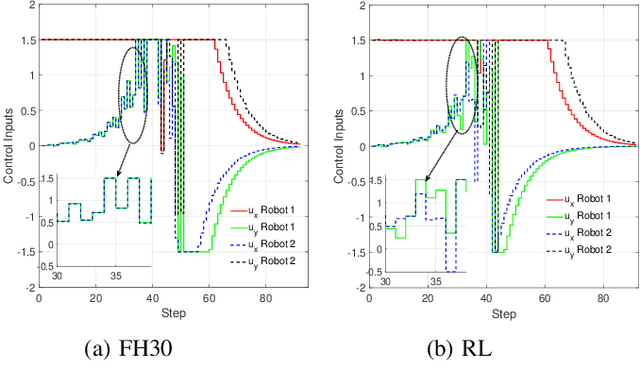
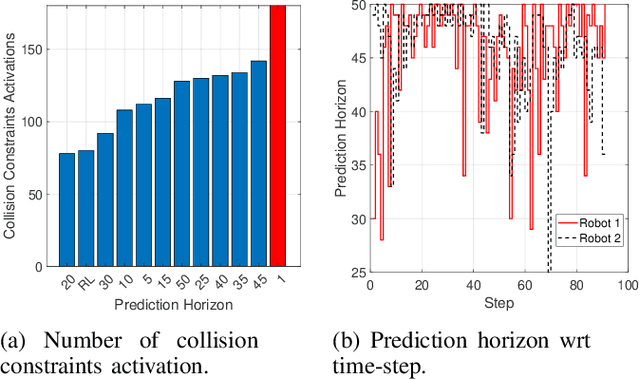
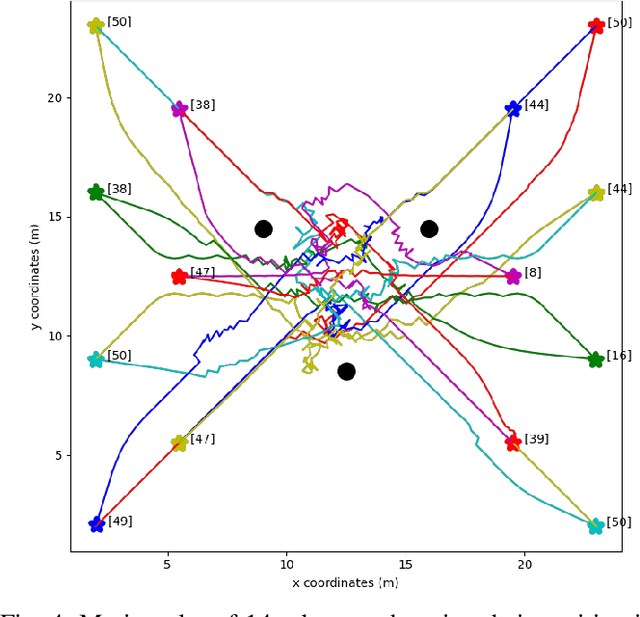
Multi-robot systems have become very popular in recent years because of their wide spectrum of applications, ranging from surveillance to cooperative payload transportation. Model Predictive Control (MPC) is a promising controller for multi-robot control because of its preview capability and ability to handle constraints easily. The performance of the MPC widely depends on many parameters, among which the prediction horizon is the major contributor. Increasing the prediction horizon beyond a limit drastically increases the computation cost. Tuning the value of the prediction horizon can be very time-consuming, and the tuning process must be repeated for every task. Moreover, instead of using a fixed horizon for an entire task, a better balance between performance and computation cost can be established if different prediction horizons can be employed for every robot at each time step. Further, for such variable prediction horizon MPC for multiple robots, on-demand collision avoidance is the key requirement. We propose Versatile On-demand Collision Avoidance (VODCA) strategy to comply with the variable horizon model predictive control. We also present a framework for learning the prediction horizon for the multi-robot system as a function of the states of the robots using the Soft Actor-Critic (SAC) RL algorithm. The results are illustrated and validated numerically for different multi-robot tasks.
Learning Vision-based Robotic Manipulation Tasks Sequentially in Offline Reinforcement Learning Settings
Jan 31, 2023With the rise of deep reinforcement learning (RL) methods, many complex robotic manipulation tasks are being solved. However, harnessing the full power of deep learning requires large datasets. Online-RL does not suit itself readily into this paradigm due to costly and time-taking agent environment interaction. Therefore recently, many offline-RL algorithms have been proposed to learn robotic tasks. But mainly, all such methods focus on a single task or multi-task learning, which requires retraining every time we need to learn a new task. Continuously learning tasks without forgetting previous knowledge combined with the power of offline deep-RL would allow us to scale the number of tasks by keep adding them one-after-another. In this paper, we investigate the effectiveness of regularisation-based methods like synaptic intelligence for sequentially learning image-based robotic manipulation tasks in an offline-RL setup. We evaluate the performance of this combined framework against common challenges of sequential learning: catastrophic forgetting and forward knowledge transfer. We performed experiments with different task combinations to analyze the effect of task ordering. We also investigated the effect of the number of object configurations and density of robot trajectories. We found that learning tasks sequentially helps in the propagation of knowledge from previous tasks, thereby reducing the time required to learn a new task. Regularisation based approaches for continuous learning like the synaptic intelligence method although helps in mitigating catastrophic forgetting but has shown only limited transfer of knowledge from previous tasks.
qRRT: Quality-Biased Incremental RRT for Optimal Motion Planning in Non-Holonomic Systems
Jan 07, 2021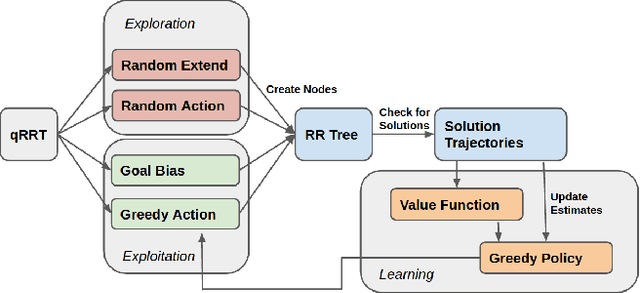
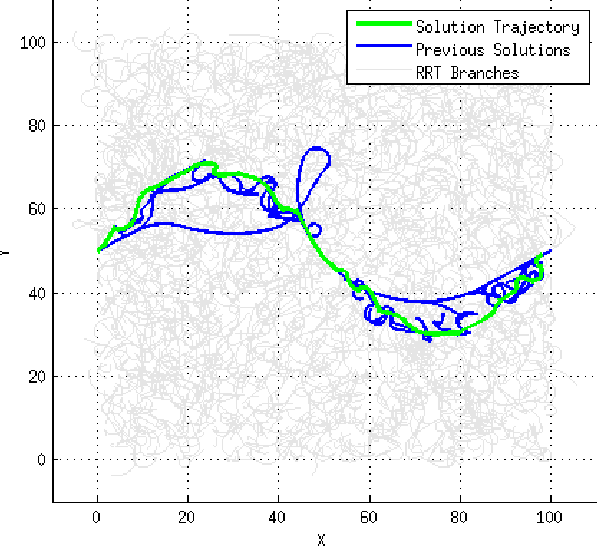
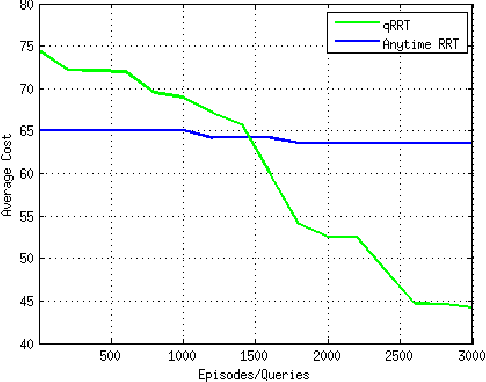
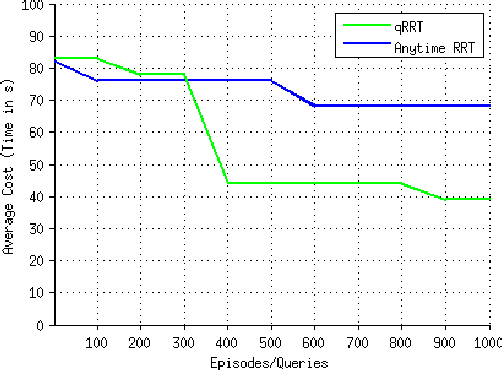
This paper presents a sampling-based method for optimal motion planning in non-holonomic systems in the absence of known cost functions. It uses the principle of learning through experience to deduce the cost-to-go of regions within the workspace. This cost information is used to bias an incremental graph-based search algorithm that produces solution trajectories. Iterative improvement of cost information and search biasing produces solutions that are proven to be asymptotically optimal. The proposed framework builds on incremental Rapidly-exploring Random Trees (RRT) for random sampling-based search and Reinforcement Learning (RL) to learn workspace costs. A series of experiments were performed to evaluate and demonstrate the performance of the proposed method.
Student Mixture Model Based Visual Servoing
Jun 19, 2020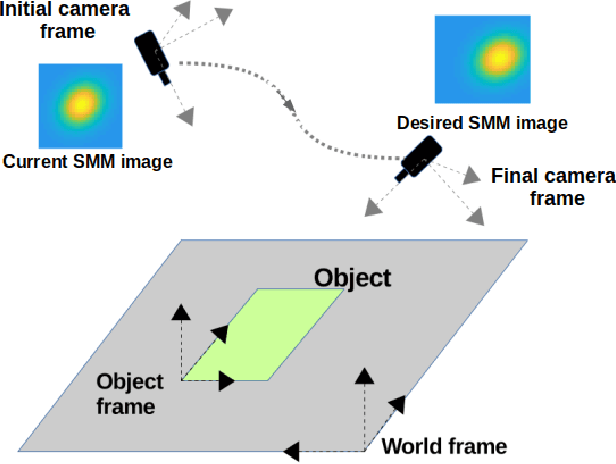
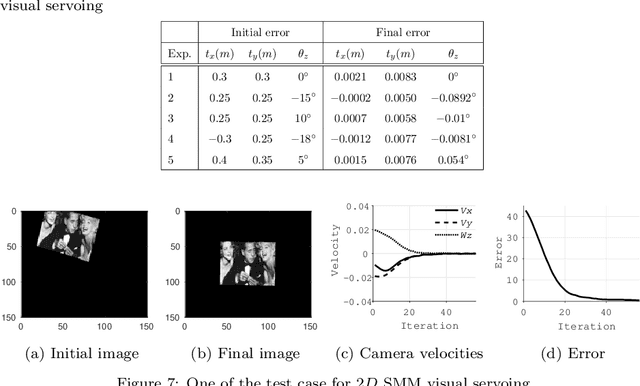
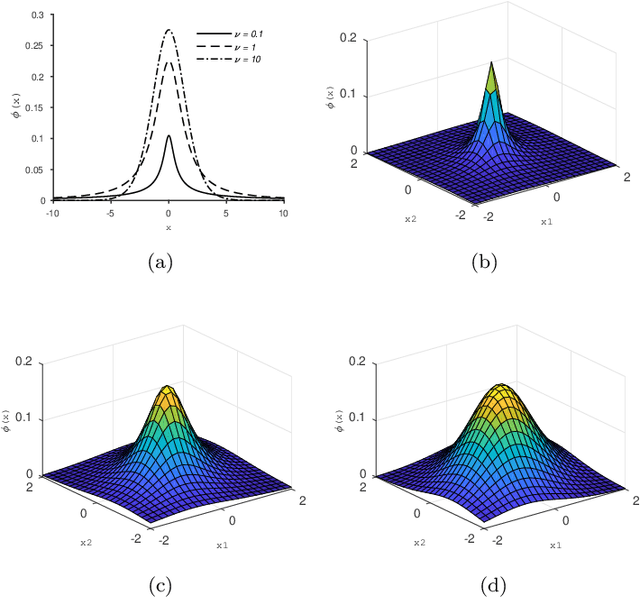
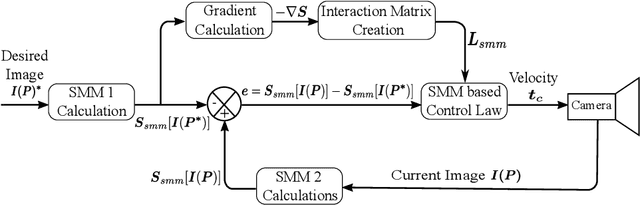
Classical Image-Based Visual Servoing (IBVS) makes use of geometric image features like point, straight line and image moments to control a robotic system. Robust extraction and real-time tracking of these features are crucial to the performance of the IBVS. Moreover, such features can be unsuitable for real world applications where it might not be easy to distinguish a target from the rest of the environment. Alternatively, an approach based on complete photometric data can avoid the requirement of feature extraction, tracking and object detection. In this work, we propose one such probabilistic model based approach which uses entire photometric data for the purpose of visual servoing. A novel image modelling method has been proposed using Student Mixture Model (SMM), which is based on Multivariate Student's t-Distribution. Consequently, a vision-based control law is formulated as a least squares minimisation problem. Efficacy of the proposed framework is demonstrated for 2D and 3D positioning tasks showing favourable error convergence and acceptable camera trajectories. Numerical experiments are also carried out to show robustness to distinct image scenes and partial occlusion.
Momentum Model-based Minimal Parameter Identification of a Space Robot
Sep 02, 2018
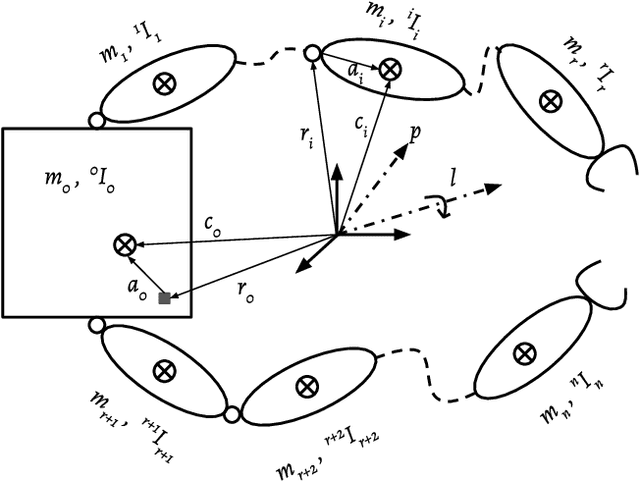

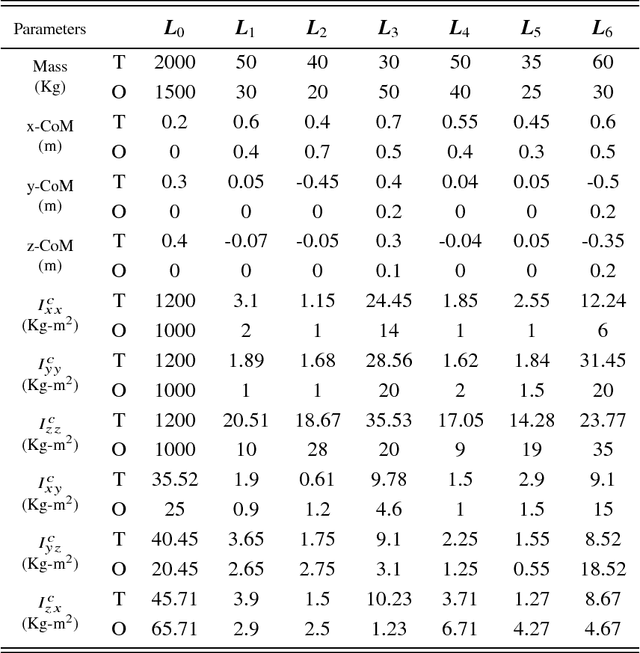
Accurate information of inertial parameters is critical to motion planning and control of space robots. Before the launch, only a rudimentary estimate of the inertial parameters is available from experiments and computer-aided design (CAD) models. After the launch, on-orbit operations substantially alter the value of inertial parameters. In this work, we propose a new momentum model-based method for identifying the minimal parameters of a space robot while on orbit. Minimal parameters are combinations of the inertial parameters of the links and uniquely define the momentum and dynamic models. Consequently, they are sufficient for motion planning and control of both the satellite and robotic arms mounted on it. The key to the proposed framework is the unique formulation of momentum model in the linear form of minimal parameters. Further, to estimate the minimal parameters, we propose a novel joint trajectory planning and optimization technique based on direction combinations of joints' velocity. The efficacy of the identification framework is demonstrated on a 12 degrees-of-freedom, spatial, dual-arm space robot. The methodology is developed for tree-type space robots, requires just the pose and twist data, and scalable with increasing number of joints.
Design of a Robust Stair Climbing Compliant Modular Robot to Tackle Overhang on Stairs
Jul 11, 2016

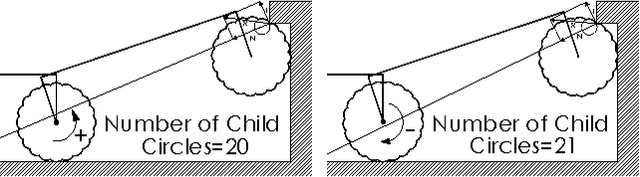

This paper discusses the concept and parameter design of a Robust Stair Climbing Compliant Modular Robot, capable of tackling stairs with overhangs. Modifying the geometry of the periphery of the wheels of our robot helps in tackling overhangs. Along with establishing a concept design, robust design parameters are set to minimize performance variation. The Grey-based Taguchi Method is adopted for providing an optimal setting for the design parameters of the robot. The robot prototype is shown to have successfully scaled stairs of varying dimensions, with overhang, thus corroborating the analysis performed.