 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMomentum Model-based Minimal Parameter Identification of a Space Robot
Sep 02, 2018
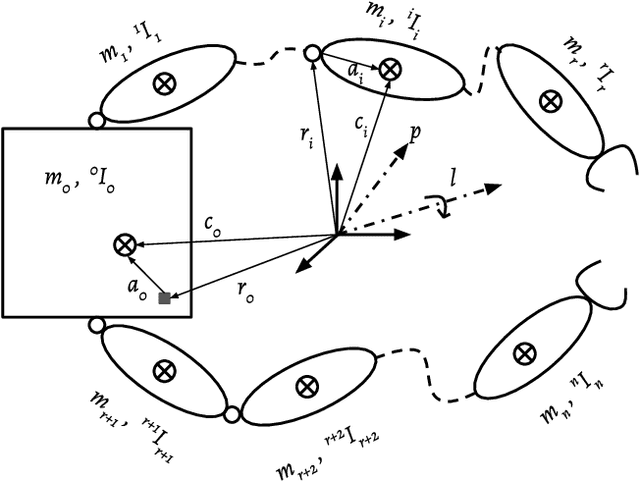

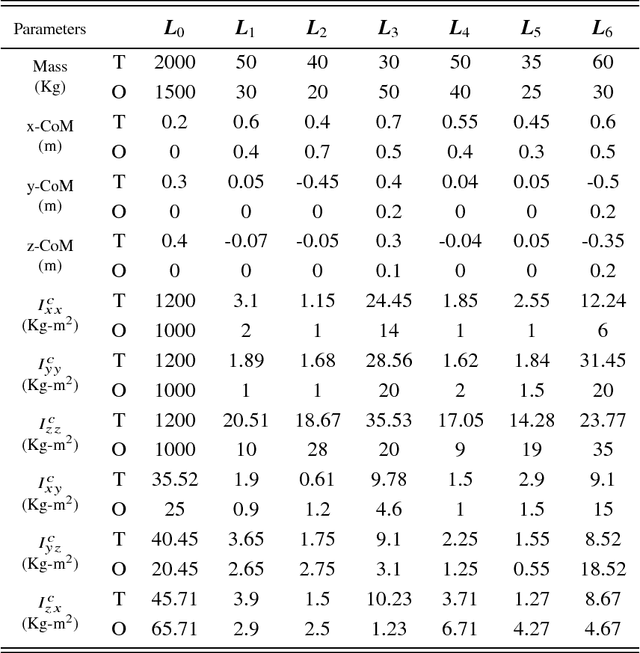
Accurate information of inertial parameters is critical to motion planning and control of space robots. Before the launch, only a rudimentary estimate of the inertial parameters is available from experiments and computer-aided design (CAD) models. After the launch, on-orbit operations substantially alter the value of inertial parameters. In this work, we propose a new momentum model-based method for identifying the minimal parameters of a space robot while on orbit. Minimal parameters are combinations of the inertial parameters of the links and uniquely define the momentum and dynamic models. Consequently, they are sufficient for motion planning and control of both the satellite and robotic arms mounted on it. The key to the proposed framework is the unique formulation of momentum model in the linear form of minimal parameters. Further, to estimate the minimal parameters, we propose a novel joint trajectory planning and optimization technique based on direction combinations of joints' velocity. The efficacy of the identification framework is demonstrated on a 12 degrees-of-freedom, spatial, dual-arm space robot. The methodology is developed for tree-type space robots, requires just the pose and twist data, and scalable with increasing number of joints.