 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeqRRT: Quality-Biased Incremental RRT for Optimal Motion Planning in Non-Holonomic Systems
Paper and Code
Jan 07, 2021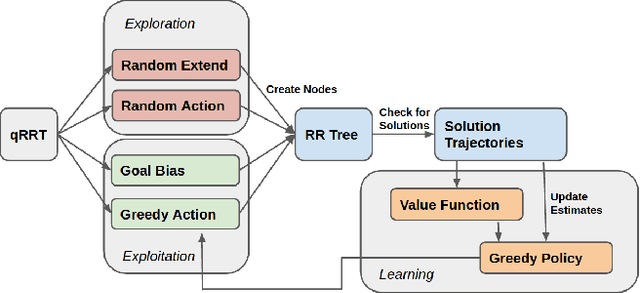
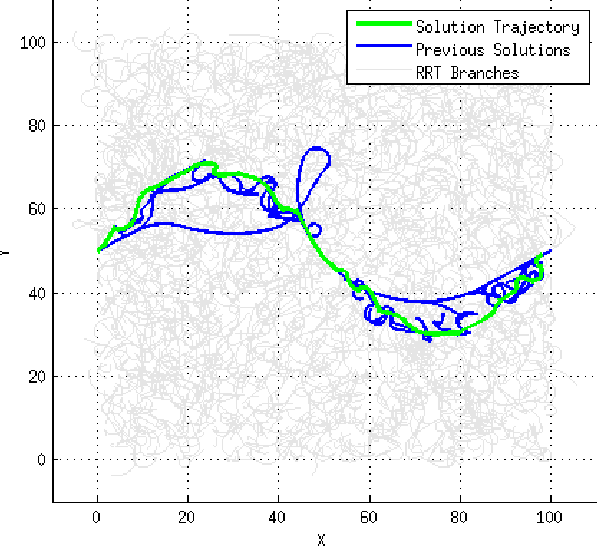
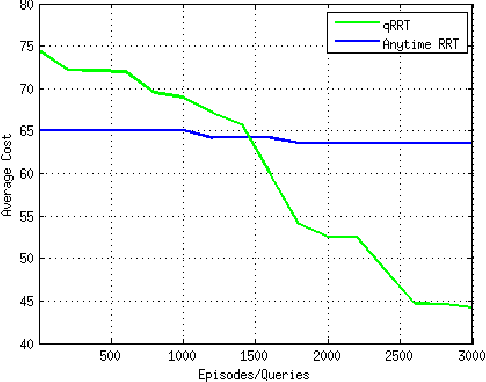
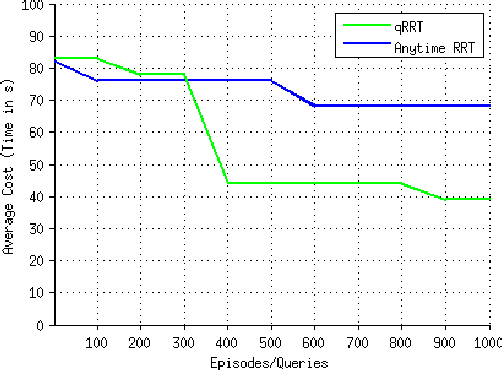
This paper presents a sampling-based method for optimal motion planning in non-holonomic systems in the absence of known cost functions. It uses the principle of learning through experience to deduce the cost-to-go of regions within the workspace. This cost information is used to bias an incremental graph-based search algorithm that produces solution trajectories. Iterative improvement of cost information and search biasing produces solutions that are proven to be asymptotically optimal. The proposed framework builds on incremental Rapidly-exploring Random Trees (RRT) for random sampling-based search and Reinforcement Learning (RL) to learn workspace costs. A series of experiments were performed to evaluate and demonstrate the performance of the proposed method.