 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssessing the robustness of critical behavior in stochastic cellular automata
Aug 01, 2022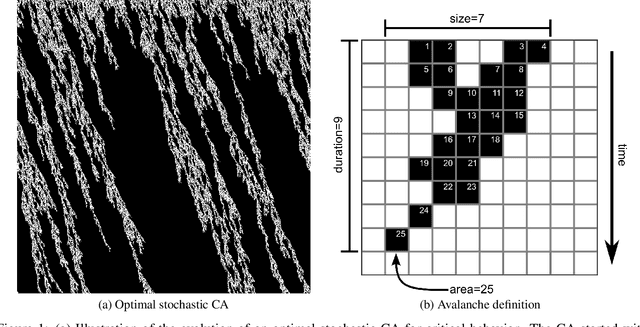
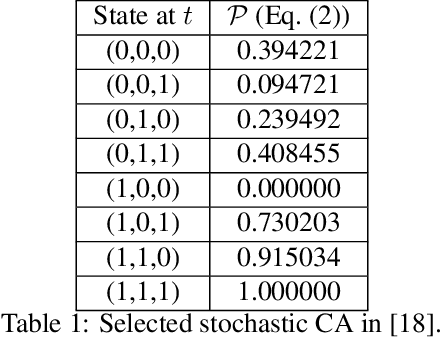
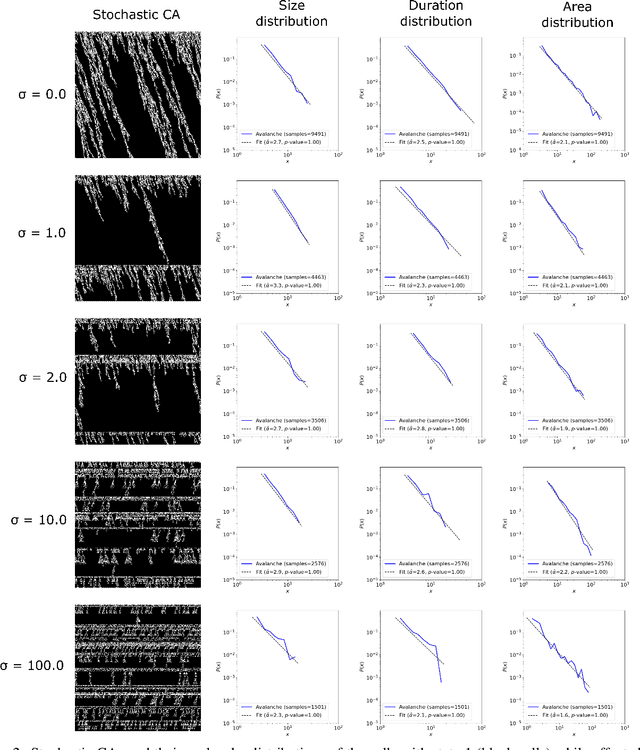
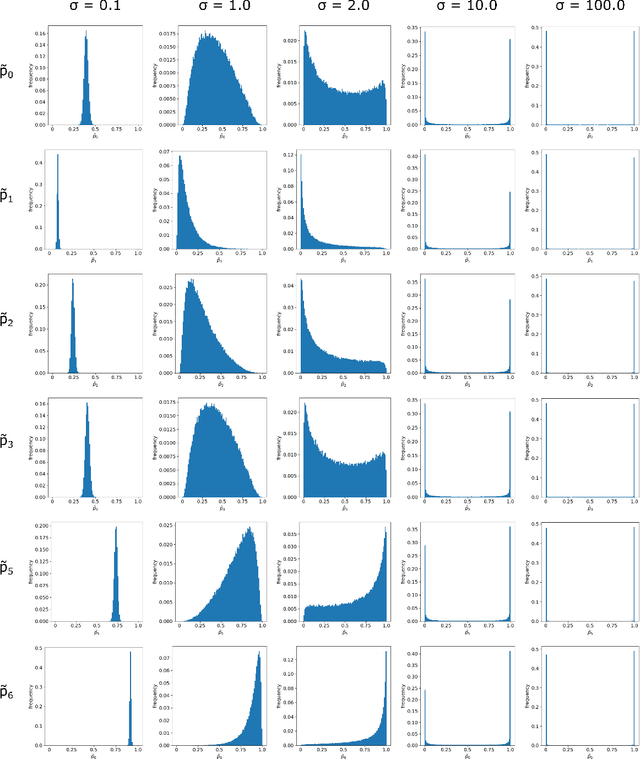
There is evidence that biological systems, such as the brain, work at a critical regime robust to noise, and are therefore able to remain in it under perturbations. In this work, we address the question of robustness of critical systems to noise. In particular, we investigate the robustness of stochastic cellular automata (CAs) at criticality. A stochastic CA is one of the simplest stochastic models showing criticality. The transition state of stochastic CA is defined through a set of probabilities. We systematically perturb the probabilities of an optimal stochastic CA known to produce critical behavior, and we report that such a CA is able to remain in a critical regime up to a certain degree of noise. We present the results using error metrics of the resulting power-law fitting, such as Kolmogorov-Smirnov statistic and Kullback-Leibler divergence. We discuss the implication of our results in regards to future realization of brain-inspired artificial intelligence systems.
Towards the Neuroevolution of Low-level Artificial General Intelligence
Jul 27, 2022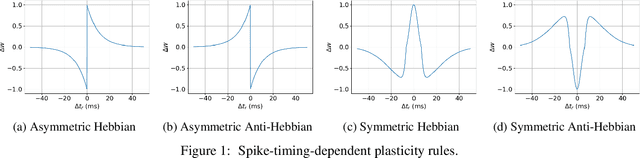
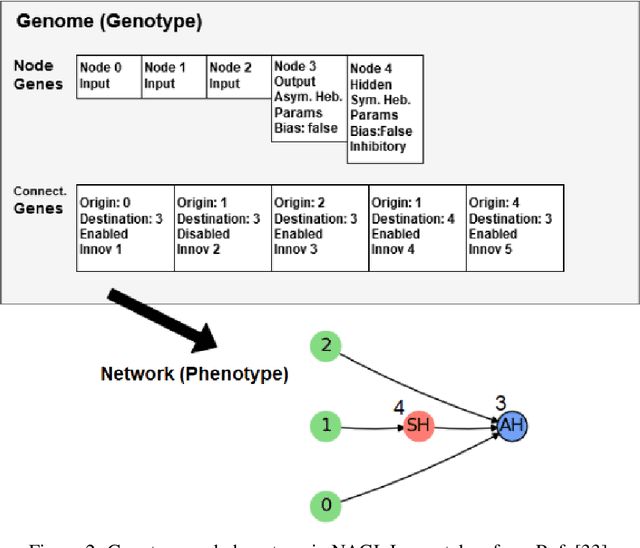
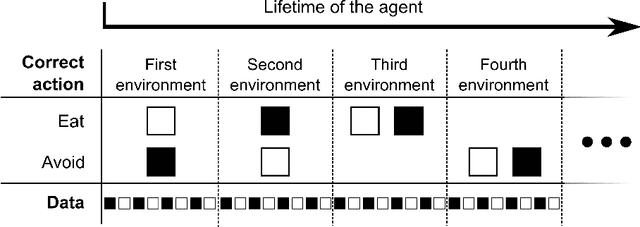
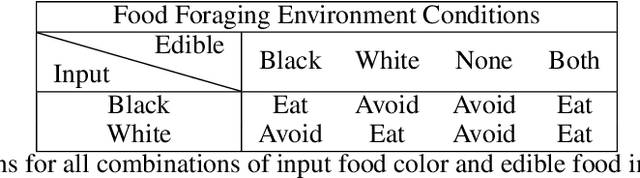
In this work, we argue that the search for Artificial General Intelligence (AGI) should start from a much lower level than human-level intelligence. The circumstances of intelligent behavior in nature resulted from an organism interacting with its surrounding environment, which could change over time and exert pressure on the organism to allow for learning of new behaviors or environment models. Our hypothesis is that learning occurs through interpreting sensory feedback when an agent acts in an environment. For that to happen, a body and a reactive environment are needed. We evaluate a method to evolve a biologically-inspired artificial neural network that learns from environment reactions named Neuroevolution of Artificial General Intelligence (NAGI), a framework for low-level AGI. This method allows the evolutionary complexification of a randomly-initialized spiking neural network with adaptive synapses, which controls agents instantiated in mutable environments. Such a configuration allows us to benchmark the adaptivity and generality of the controllers. The chosen tasks in the mutable environments are food foraging, emulation of logic gates, and cart-pole balancing. The three tasks are successfully solved with rather small network topologies and therefore it opens up the possibility of experimenting with more complex tasks and scenarios where curriculum learning is beneficial.
Collective control of modular soft robots via embodied Spiking Neural Cellular Automata
Apr 05, 2022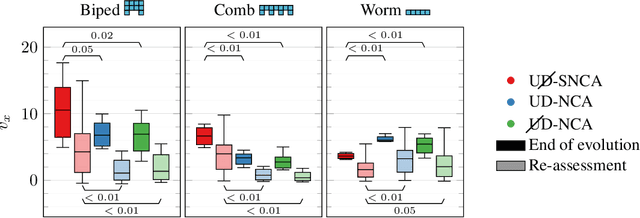
Voxel-based Soft Robots (VSRs) are a form of modular soft robots, composed of several deformable cubes, i.e., voxels. Each VSR is thus an ensemble of simple agents, namely the voxels, which must cooperate to give rise to the overall VSR behavior. Within this paradigm, collective intelligence plays a key role in enabling the emerge of coordination, as each voxel is independently controlled, exploiting only the local sensory information together with some knowledge passed from its direct neighbors (distributed or collective control). In this work, we propose a novel form of collective control, influenced by Neural Cellular Automata (NCA) and based on the bio-inspired Spiking Neural Networks: the embodied Spiking NCA (SNCA). We experiment with different variants of SNCA, and find them to be competitive with the state-of-the-art distributed controllers for the task of locomotion. In addition, our findings show significant improvement with respect to the baseline in terms of adaptability to unforeseen environmental changes, which could be a determining factor for physical practicability of VSRs.
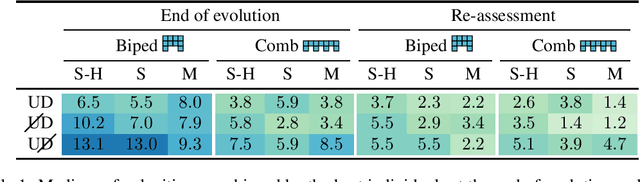
A Unified Substrate for Body-Brain Co-evolution
Mar 22, 2022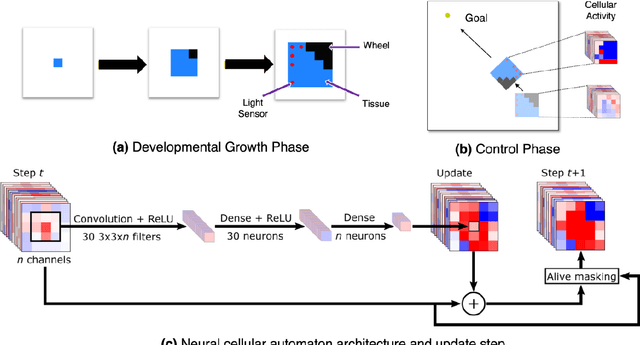
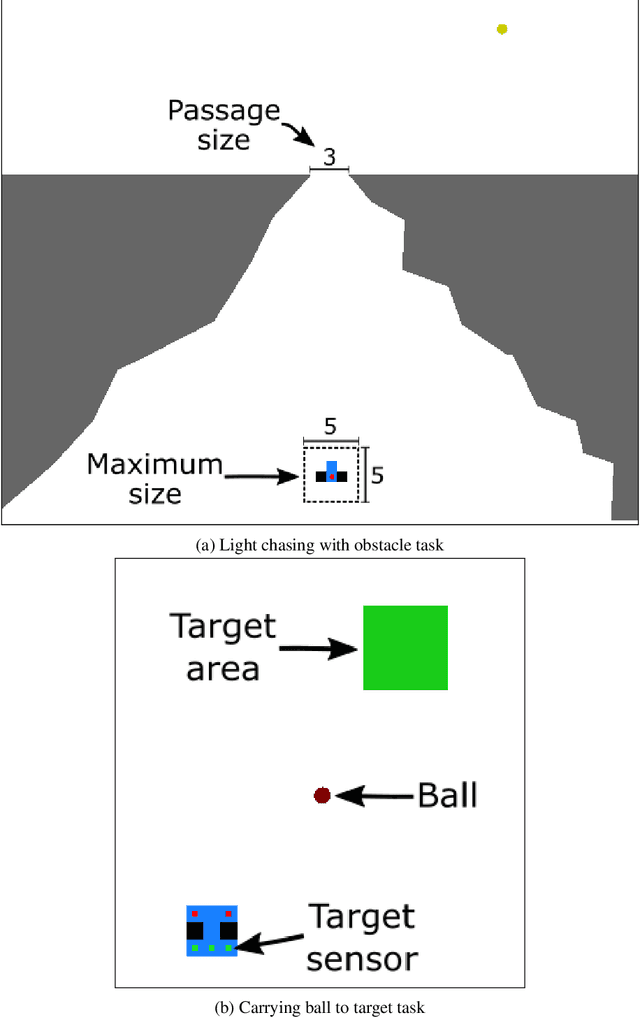
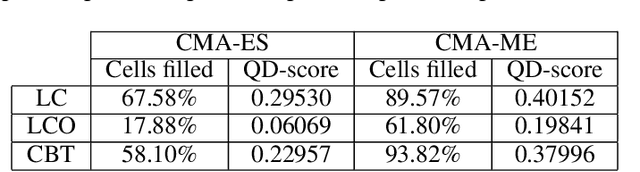
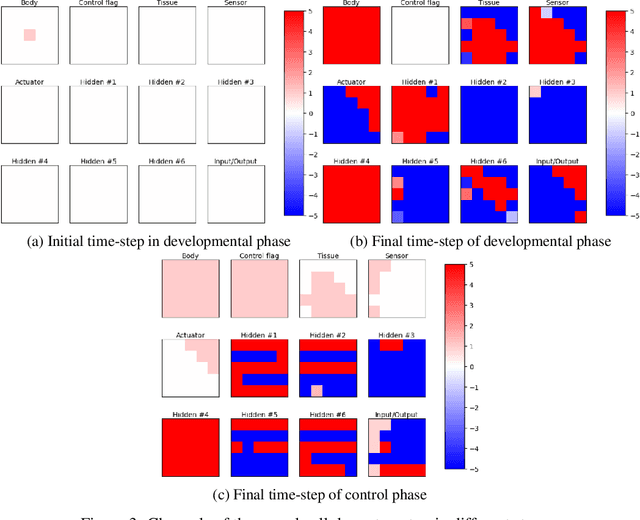
A successful development of a complex multicellular organism took millions of years of evolution. The genome of such a multicellular organism guides the development of its body from a single cell, including its control system. Our goal is to imitate this natural process using a single neural cellular automaton (NCA) as a genome for modular robotic agents. In the introduced approach, called Neural Cellular Robot Substrate (NCRS), a single NCA guides the growth of a robot and the cellular activity which controls the robot during deployment. We also introduce three benchmark environments, which test the ability of the approach to grow different robot morphologies. We evolve the NCRS with covariance matrix adaptation evolution strategy (CMA-ES), and covariance matrix adaptation MAP-Elites (CMA-ME) for quality diversity and observe that CMA-ME generates more diverse robot morphologies with higher fitness scores. While the NCRS is able to solve the easier tasks in the benchmark, the success rate reduces when the difficulty of the task increases. We discuss directions for future work that may facilitate the use of the NCRS approach for more complex domains.
Towards self-organized control: Using neural cellular automata to robustly control a cart-pole agent
Jul 12, 2021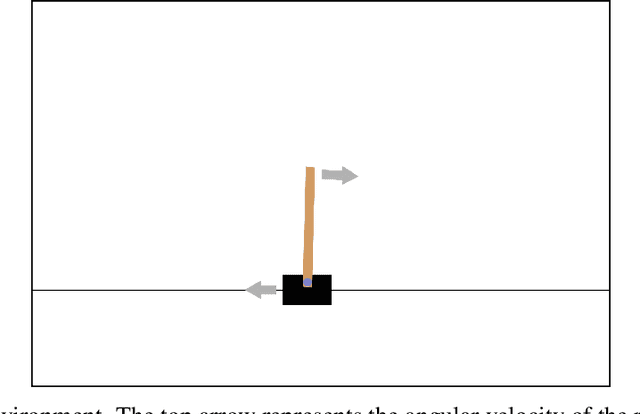



Neural cellular automata (Neural CA) are a recent framework used to model biological phenomena emerging from multicellular organisms. In these systems, artificial neural networks are used as update rules for cellular automata. Neural CA are end-to-end differentiable systems where the parameters of the neural network can be learned to achieve a particular task. In this work, we used neural CA to control a cart-pole agent. The observations of the environment are transmitted in input cells, while the values of output cells are used as a readout of the system. We trained the model using deep-Q learning, where the states of the output cells were used as the Q-value estimates to be optimized. We found that the computing abilities of the cellular automata were maintained over several hundreds of thousands of iterations, producing an emergent stable behavior in the environment it controls for thousands of steps. Moreover, the system demonstrated life-like phenomena such as a developmental phase, regeneration after damage, stability despite a noisy environment, and robustness to unseen disruption such as input deletion.
A deep learning based tool for automatic brain extraction from functional magnetic resonance images in rodents
Dec 06, 2019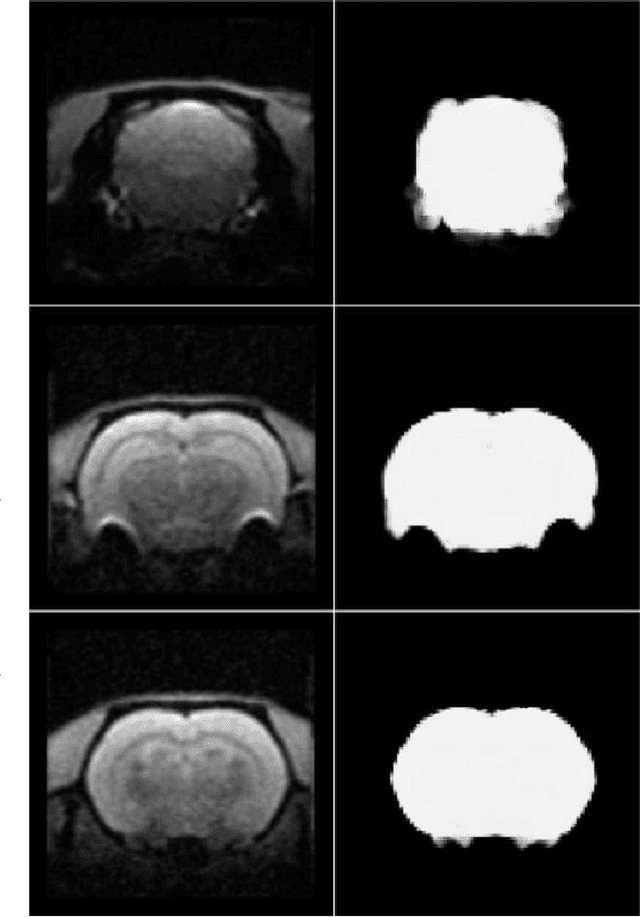
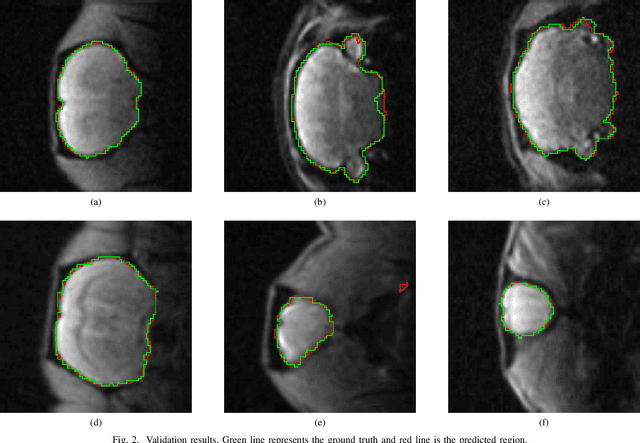
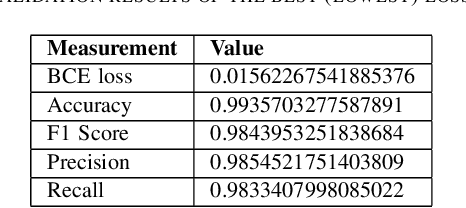
Removing skull artifacts from functional magnetic images (fMRI) is a well understood and frequently encountered problem. Because the fMRI field has grown mostly due to human studies, many new tools were developed to handle human data. Nonetheless, these tools are not equally useful to handle the data derived from animal studies, especially from rodents. This represents a major problem to the field because rodent studies generate larger datasets from larger populations, which implies that preprocessing these images manually to remove the skull becomes a bottleneck in the data analysis pipeline. In this study, we address this problem by implementing a neural network based method that uses a U-Net architecture to segment the brain area into a mask and removing the skull and other tissues from the image. We demonstrate several strategies to speed up the process of generating the training dataset using watershedding and several strategies for data augmentation that allowed to train faster the U-Net to perform the segmentation. Finally, we deployed the trained network freely available.
A general representation of dynamical systems for reservoir computing
Jul 03, 2019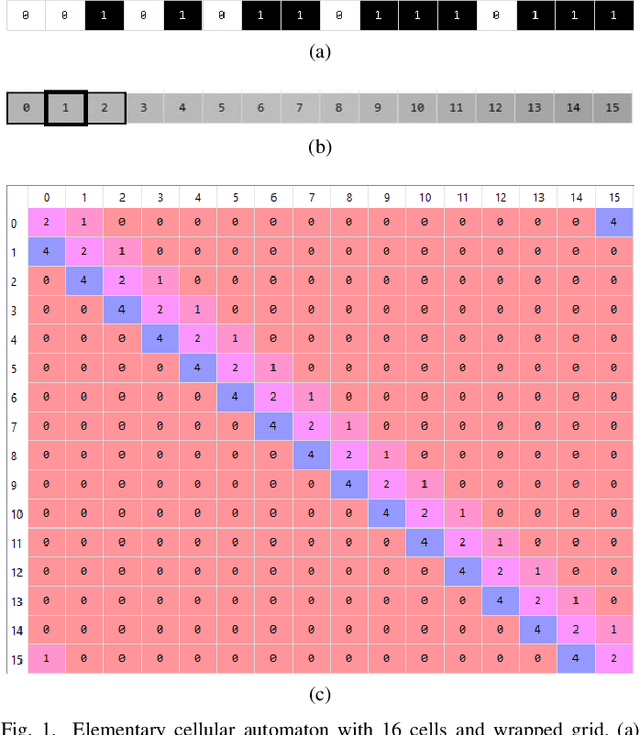
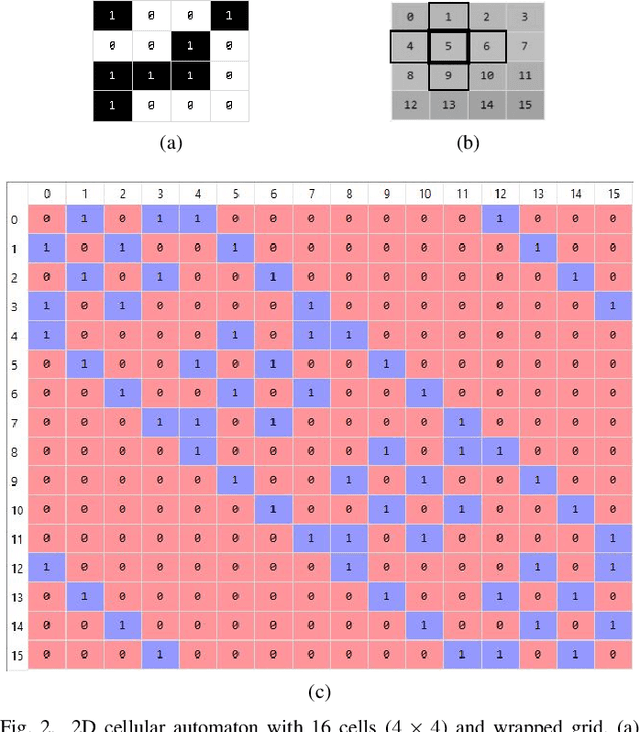
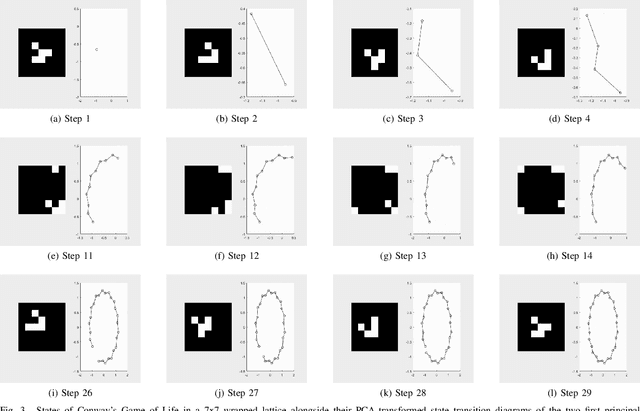
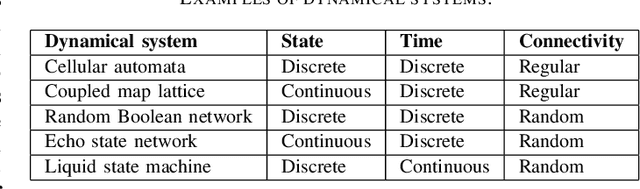
Dynamical systems are capable of performing computation in a reservoir computing paradigm. This paper presents a general representation of these systems as an artificial neural network (ANN). Initially, we implement the simplest dynamical system, a cellular automaton. The mathematical fundamentals behind an ANN are maintained, but the weights of the connections and the activation function are adjusted to work as an update rule in the context of cellular automata. The advantages of such implementation are its usage on specialized and optimized deep learning libraries, the capabilities to generalize it to other types of networks and the possibility to evolve cellular automata and other dynamical systems in terms of connectivity, update and learning rules. Our implementation of cellular automata constitutes an initial step towards a general framework for dynamical systems. It aims to evolve such systems to optimize their usage in reservoir computing and to model physical computing substrates.
DeepTEGINN: Deep Learning Based Tools to Extract Graphs from Images of Neural Networks
Jul 01, 2019

In the brain, the structure of a network of neurons defines how these neurons implement the computations that underlie the mind and the behavior of animals and humans. Provided that we can describe the network of neurons as a graph, we can employ methods from graph theory to investigate its structure or use cellular automata to mathematically assess its function. Although, software for the analysis of graphs and cellular automata are widely available. Graph extraction from the image of networks of brain cells remains difficult. Nervous tissue is heterogeneous, and differences in anatomy may reflect relevant differences in function. Here we introduce a deep learning based toolbox to extracts graphs from images of brain tissue. This toolbox provides an easy-to-use framework allowing system neuroscientists to generate graphs based on images of brain tissue by combining methods from image processing, deep learning, and graph theory. The goals are to simplify the training and usage of deep learning methods for computer vision and facilitate its integration into graph extraction pipelines. In this way, the toolbox provides an alternative to the required laborious manual process of tracing, sorting and classifying. We expect to democratize the machine learning methods to a wider community of users beyond the computer vision experts and improve the time-efficiency of graph extraction from large brain image datasets, which may lead to further understanding of the human mind.
Towards a framework for the evolution of artificial general intelligence
Mar 27, 2019

In this work, a novel framework for the emergence of general intelligence is proposed, where agents evolve through environmental rewards and learn throughout their lifetime without supervision, i.e., self-supervised learning through embodiment. The chosen control mechanism for agents is a biologically plausible neuron model based on spiking neural networks. Network topologies become more complex through evolution, i.e., the topology is not fixed, while the synaptic weights of the networks cannot be inherited, i.e., newborn brains are not trained and have no innate knowledge of the environment. What is subject to the evolutionary process is the network topology, the type of neurons, and the type of learning. This process ensures that controllers that are passed through the generations have the intrinsic ability to learn and adapt during their lifetime in mutable environments. We envision that the described approach may lead to the emergence of the simplest form of artificial general intelligence.
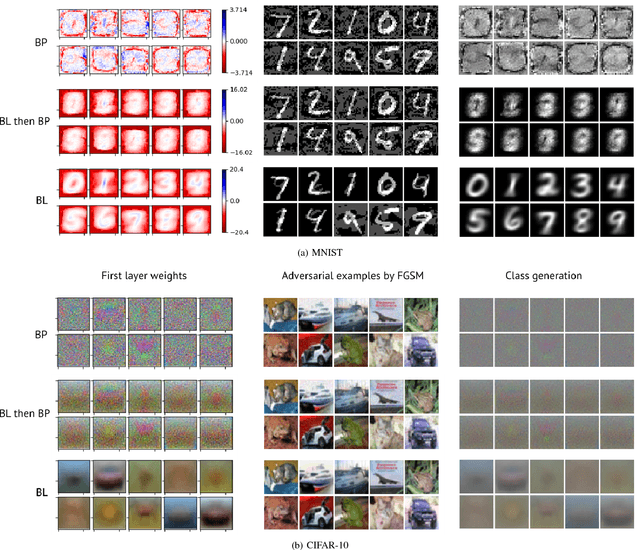
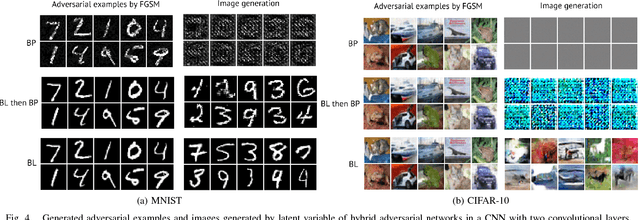
Bidirectional Learning for Robust Neural Networks
May 21, 2018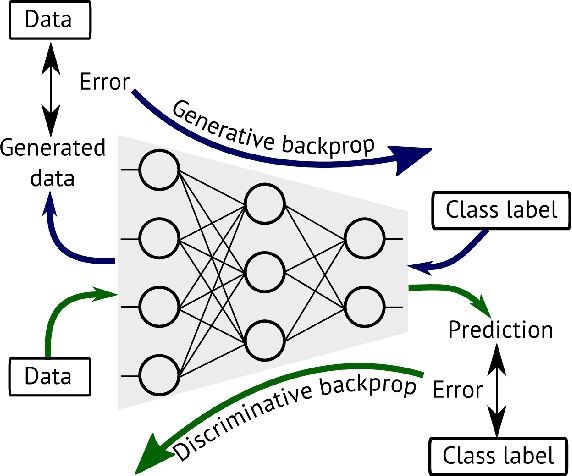
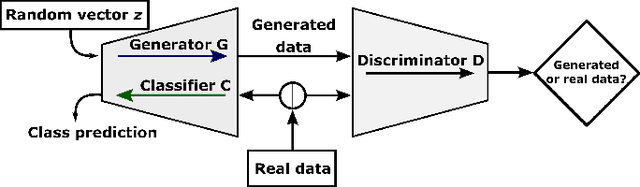
A multilayer perceptron can behave as a generative classifier by applying bidirectional learning (BL). It consists of training an undirected neural network to map input to output and vice-versa; therefore it can produce a classifier in one direction, and a generator in the opposite direction for the same data. In this paper, two novel learning techniques are introduced which use BL for improving robustness to white noise static and adversarial examples. The first method is bidirectional propagation of errors, which the error propagation occurs in backward and forward directions. Motivated by the fact that its generative model receives as input a constant vector per class, we introduce as a second method the hybrid adversarial networks (HAN). Its generative model receives a random vector as input and its training is based on generative adversarial networks (GAN). To assess the performance of BL, we perform experiments using several architectures with fully and convolutional layers, with and without bias. Experimental results show that both methods improve robustness to white noise static and adversarial examples, but have different behaviour depending on the architecture and task, being more beneficial to use the one or the other. Nevertheless, HAN using a convolutional architecture with batch normalization presents outstanding robustness, reaching state-of-the-art accuracy on adversarial examples of hand-written digits.