 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSevere Damage Recovery in Evolving Soft Robots through Differentiable Programming
Jun 14, 2022Biological systems are very robust to morphological damage, but artificial systems (robots) are currently not. In this paper we present a system based on neural cellular automata, in which locomoting robots are evolved and then given the ability to regenerate their morphology from damage through gradient-based training. Our approach thus combines the benefits of evolution to discover a wide range of different robot morphologies, with the efficiency of supervised training for robustness through differentiable update rules. The resulting neural cellular automata are able to grow virtual robots capable of regaining more than 80\% of their functionality, even after severe types of morphological damage.
A Unified Substrate for Body-Brain Co-evolution
Mar 22, 2022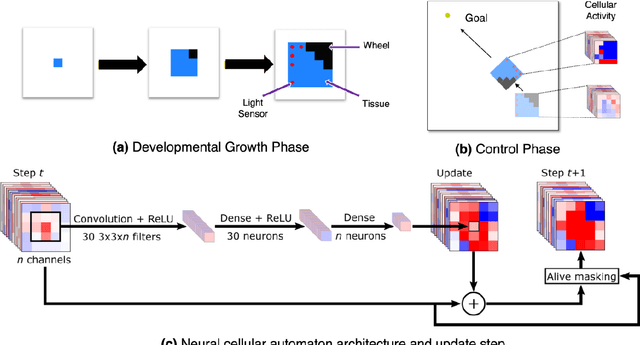
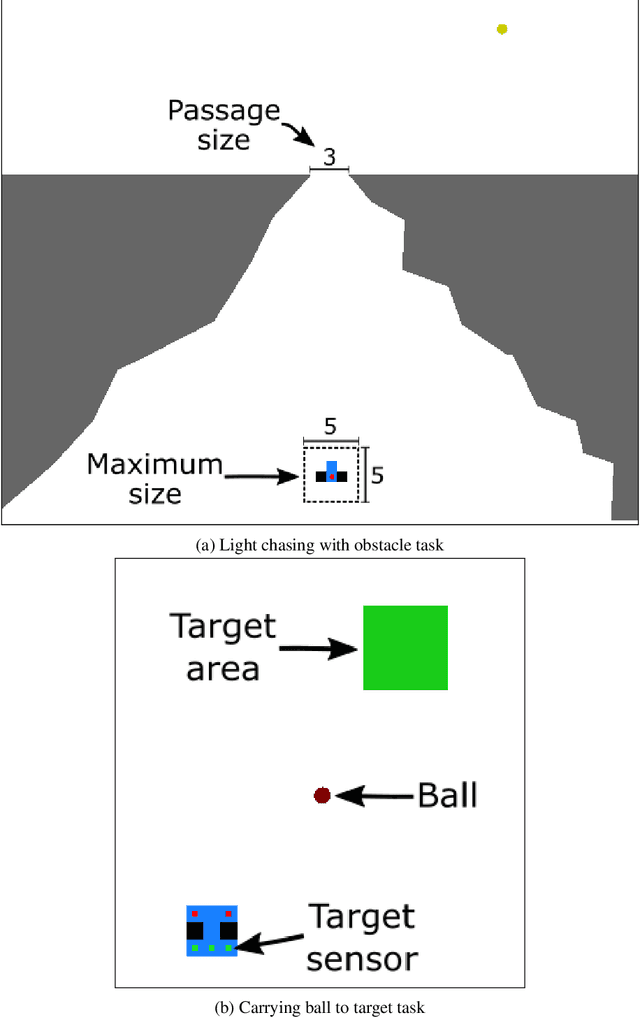
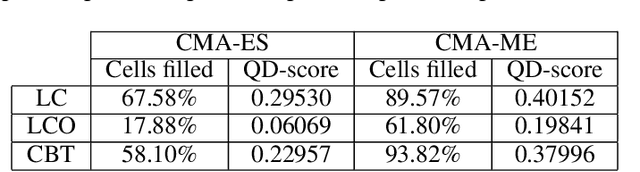
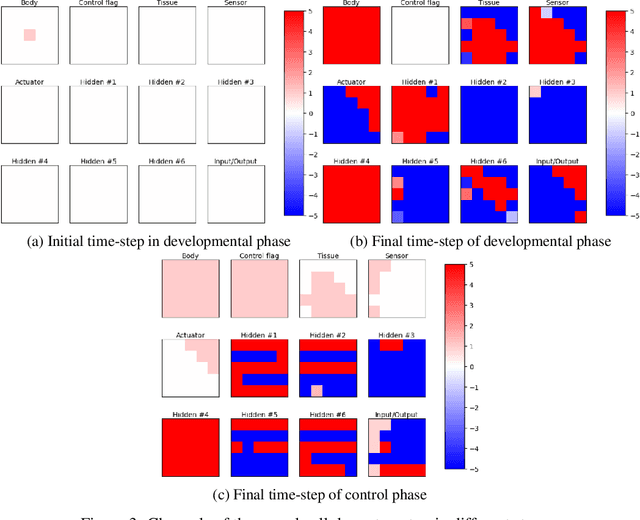
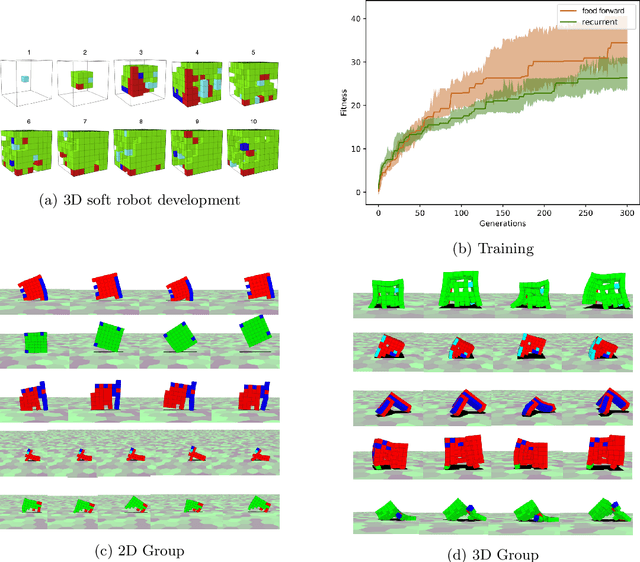
A successful development of a complex multicellular organism took millions of years of evolution. The genome of such a multicellular organism guides the development of its body from a single cell, including its control system. Our goal is to imitate this natural process using a single neural cellular automaton (NCA) as a genome for modular robotic agents. In the introduced approach, called Neural Cellular Robot Substrate (NCRS), a single NCA guides the growth of a robot and the cellular activity which controls the robot during deployment. We also introduce three benchmark environments, which test the ability of the approach to grow different robot morphologies. We evolve the NCRS with covariance matrix adaptation evolution strategy (CMA-ES), and covariance matrix adaptation MAP-Elites (CMA-ME) for quality diversity and observe that CMA-ME generates more diverse robot morphologies with higher fitness scores. While the NCRS is able to solve the easier tasks in the benchmark, the success rate reduces when the difficulty of the task increases. We discuss directions for future work that may facilitate the use of the NCRS approach for more complex domains.
Physical Neural Cellular Automata for 2D Shape Classification
Mar 14, 2022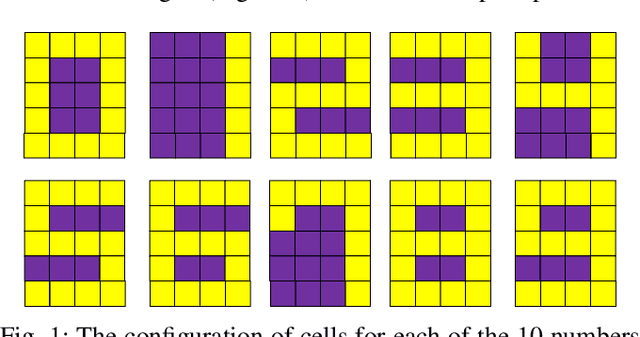
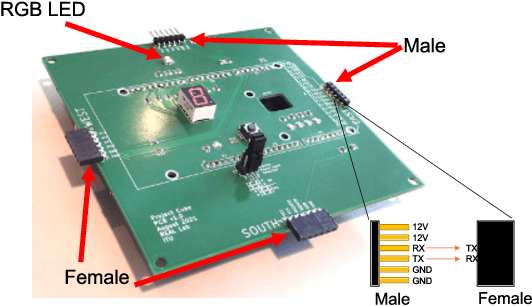
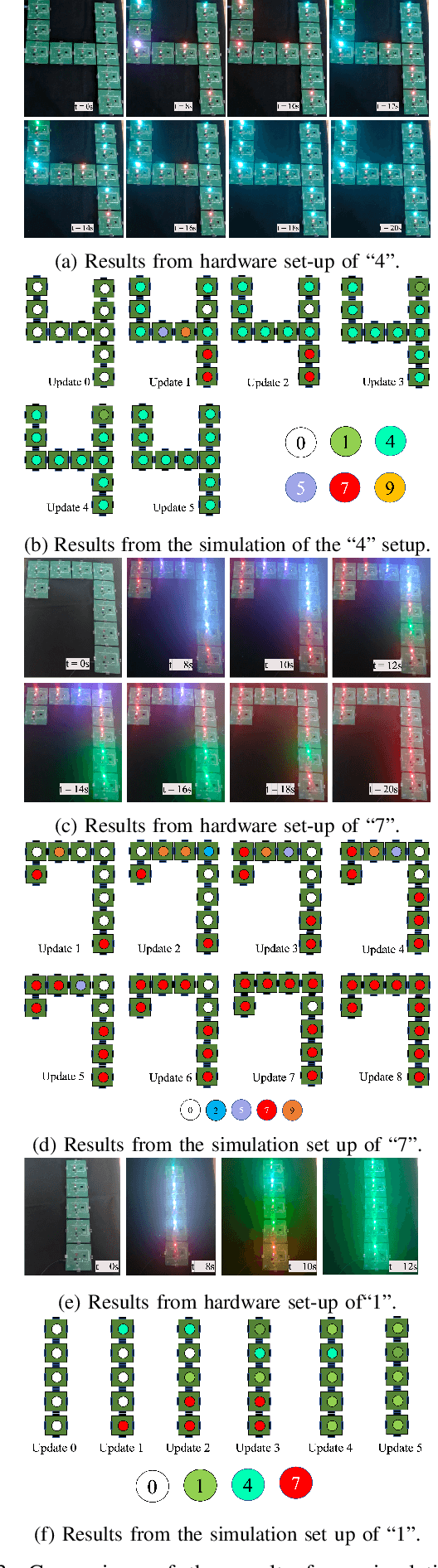
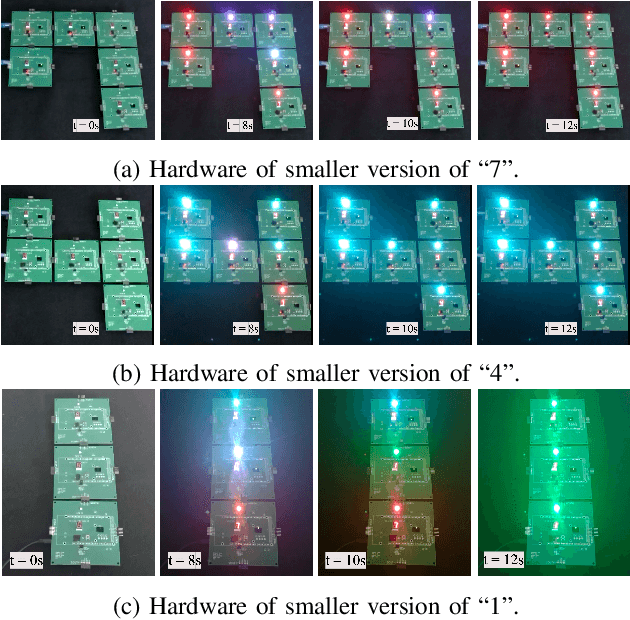
Materials with the ability to self-classify their own shape have the potential to advance a wide range of engineering applications and industries. Biological systems possess the ability not only to self-reconfigure but also to self-classify themselves to determine a general shape and function. Previous work into modular robotics systems have only enabled self-recognition and self-reconfiguration into a specific target shape, missing the inherent robustness present in nature to self-classify. In this paper we therefore take advantage of recent advances in deep learning and neural cellular automata, and present a simple modular 2D robotic system that can infer its own class of shape through the local communication of its components. Furthermore, we show that our system can be successfully transferred to hardware which thus opens opportunities for future self-classifying machines.
Regenerating Soft Robots through Neural Cellular Automata
Feb 07, 2021


Morphological regeneration is an important feature that highlights the environmental adaptive capacity of biological systems. Lack of this regenerative capacity significantly limits the resilience of machines and the environments they can operate in. To aid in addressing this gap, we develop an approach for simulated soft robots to regrow parts of their morphology when being damaged. Although numerical simulations using soft robots have played an important role in their design, evolving soft robots with regenerative capabilities have so far received comparable little attention. Here we propose a model for soft robots that regenerate through a neural cellular automata. Importantly, this approach only relies on local cell information to regrow damaged components, opening interesting possibilities for physical regenerable soft robots in the future. Our approach allows simulated soft robots that are damaged to partially regenerate their original morphology through local cell interactions alone and regain some of their ability to locomote. These results take a step towards equipping artificial systems with regenerative capacities and could potentially allow for more robust operations in a variety of situations and environments. The code for the experiments in this paper is available at: \url{github.com/KazuyaHoribe/RegeneratingSoftRobots}.