 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modular MANTA-RAY: A Modular Soft Surface Platform for Distributed Multi-Object Manipulation
Jan 29, 2026Manipulation surfaces control objects by actively deforming their shape rather than directly grasping them. While dense actuator arrays can generate complex deformations, they also introduce high degrees of freedom (DOF), increasing system complexity and limiting scalability. The MANTA-RAY (Manipulation with Adaptive Non-rigid Textile Actuation with Reduced Actuation densitY) platform addresses these challenges by leveraging a soft, fabric-based surface with reduced actuator density to manipulate fragile and heterogeneous objects. Previous studies focused on single-module implementations supported by four actuators, whereas the feasibility and benefits of a scalable, multi-module configuration remain unexplored. In this work, we present a distributed, modular, and scalable variant of the MANTA-RAY platform that maintains manipulation performance with a reduced actuator density. The proposed multi-module MANTA-RAY platform and control strategy employs object passing between modules and a geometric transformation driven PID controller that directly maps tilt-angle control outputs to actuator commands, eliminating the need for extensive data-driven or black-box training. We evaluate system performance in simulation across surface configurations of varying modules (3x3 and 4x4) and validate its feasibility through experiments on a physical 2x2 hardware prototype. The system successfully manipulates objects with diverse geometries, masses, and textures including fragile items such as eggs and apples as well as enabling parallel manipulation. The results demonstrate that the multi-module MANTA-RAY improves scalability and enables coordinated manipulation of multiple objects across larger areas, highlighting its potential for practical, real-world applications.
Autonomous nanoparticle synthesis by design
May 19, 2025Controlled synthesis of materials with specified atomic structures underpins technological advances yet remains reliant on iterative, trial-and-error approaches. Nanoparticles (NPs), whose atomic arrangement dictates their emergent properties, are particularly challenging to synthesise due to numerous tunable parameters. Here, we introduce an autonomous approach explicitly targeting synthesis of atomic-scale structures. Our method autonomously designs synthesis protocols by matching real time experimental total scattering (TS) and pair distribution function (PDF) data to simulated target patterns, without requiring prior synthesis knowledge. We demonstrate this capability at a synchrotron, successfully synthesising two structurally distinct gold NPs: 5 nm decahedral and 10 nm face-centred cubic structures. Ultimately, specifying a simulated target scattering pattern, thus representing a bespoke atomic structure, and obtaining both the synthesised material and its reproducible synthesis protocol on demand may revolutionise materials design. Thus, ScatterLab provides a generalisable blueprint for autonomous, atomic structure-targeted synthesis across diverse systems and applications.
Physical Neural Cellular Automata for 2D Shape Classification
Mar 14, 2022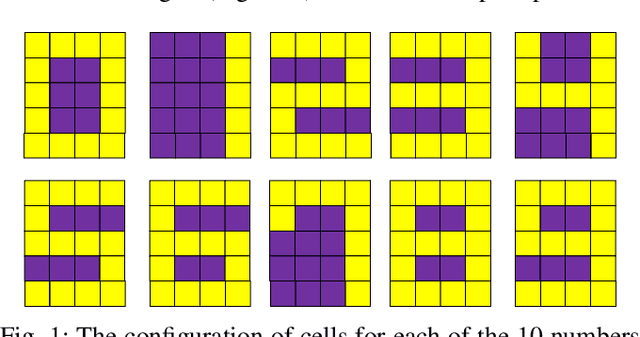
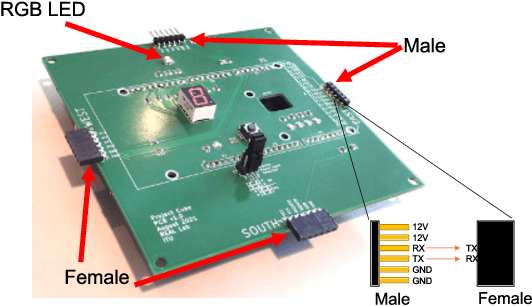
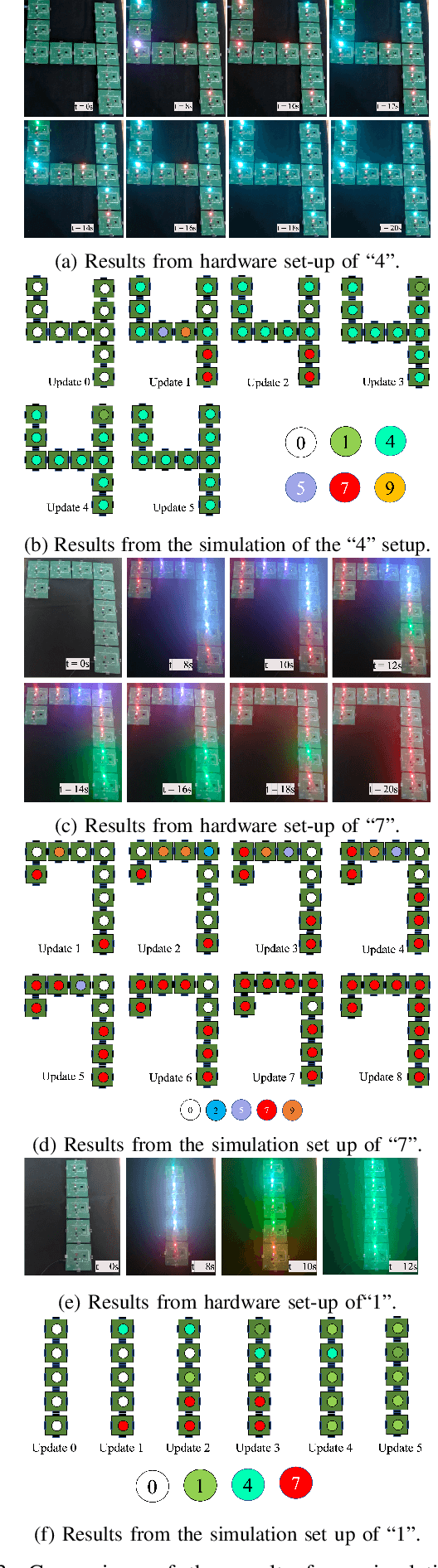
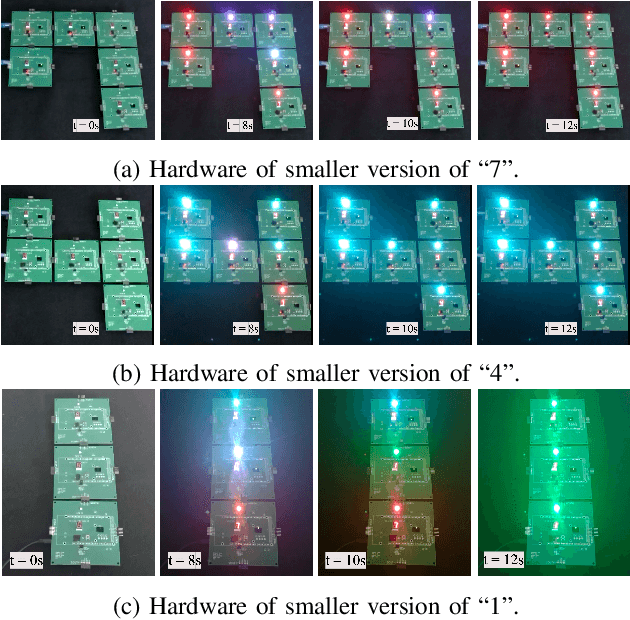
Materials with the ability to self-classify their own shape have the potential to advance a wide range of engineering applications and industries. Biological systems possess the ability not only to self-reconfigure but also to self-classify themselves to determine a general shape and function. Previous work into modular robotics systems have only enabled self-recognition and self-reconfiguration into a specific target shape, missing the inherent robustness present in nature to self-classify. In this paper we therefore take advantage of recent advances in deep learning and neural cellular automata, and present a simple modular 2D robotic system that can infer its own class of shape through the local communication of its components. Furthermore, we show that our system can be successfully transferred to hardware which thus opens opportunities for future self-classifying machines.