 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSleep-Based Homeostatic Regularization for Stabilizing Spike-Timing-Dependent Plasticity in Recurrent Spiking Neural Networks
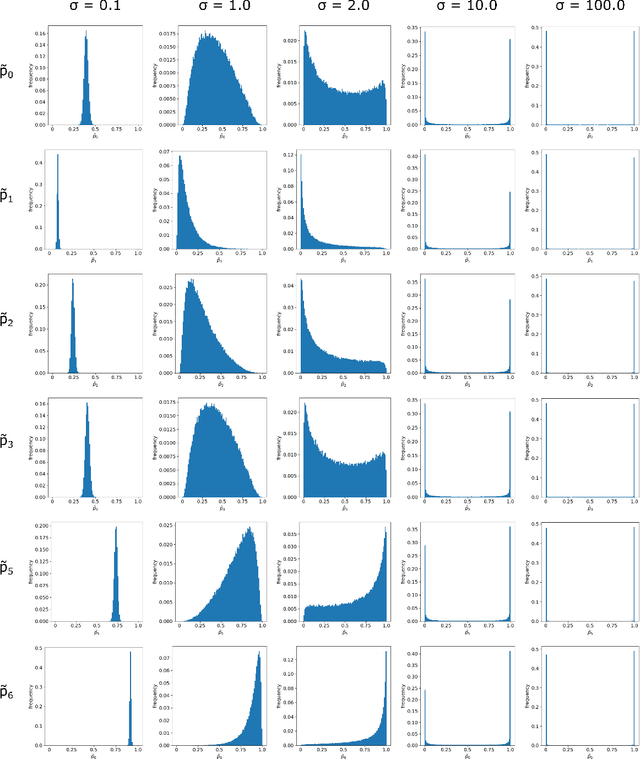
Jan 13, 2026Spike-timing-dependent plasticity (STDP) provides a biologically-plausible learning mechanism for spiking neural networks (SNNs); however, Hebbian weight updates in architectures with recurrent connections suffer from pathological weight dynamics: unbounded growth, catastrophic forgetting, and loss of representational diversity. We propose a neuromorphic regularization scheme inspired by the synaptic homeostasis hypothesis: periodic offline phases during which external inputs are suppressed, synaptic weights undergo stochastic decay toward a homeostatic baseline, and spontaneous activity enables memory consolidation. We demonstrate that this sleep-wake cycle prevents weight saturation while preserving learned structure. Empirically, we find that low to intermediate sleep durations (10-20\% of training) improve stability on MNIST-like benchmarks in our STDP-SNN model, without any data-specific hyperparameter tuning. In contrast, the same sleep intervention yields no measurable benefit for the surrogate-gradient spiking neural network (SG-SNN). Taken together, these results suggest that periodic, sleep-based renormalization may represent a fundamental mechanism for stabilizing local Hebbian learning in neuromorphic systems, while also indicating that special care is required when integrating such protocols with existing gradient-based optimization methods.
ARC-NCA: Towards Developmental Solutions to the Abstraction and Reasoning Corpus
May 13, 2025The Abstraction and Reasoning Corpus (ARC), later renamed ARC-AGI, poses a fundamental challenge in artificial general intelligence (AGI), requiring solutions that exhibit robust abstraction and reasoning capabilities across diverse tasks, while only few (with median count of three) correct examples are presented. While ARC-AGI remains very challenging for artificial intelligence systems, it is rather easy for humans. This paper introduces ARC-NCA, a developmental approach leveraging standard Neural Cellular Automata (NCA) and NCA enhanced with hidden memories (EngramNCA) to tackle the ARC-AGI benchmark. NCAs are employed for their inherent ability to simulate complex dynamics and emergent patterns, mimicking developmental processes observed in biological systems. Developmental solutions may offer a promising avenue for enhancing AI's problem-solving capabilities beyond mere training data extrapolation. ARC-NCA demonstrates how integrating developmental principles into computational models can foster adaptive reasoning and abstraction. We show that our ARC-NCA proof-of-concept results may be comparable to, and sometimes surpass, that of ChatGPT 4.5, at a fraction of the cost.
EngramNCA: a Neural Cellular Automaton Model of Memory Transfer
Apr 16, 2025This study introduces EngramNCA, a neural cellular automaton (NCA) that integrates both publicly visible states and private, cell-internal memory channels, drawing inspiration from emerging biological evidence suggesting that memory storage extends beyond synaptic modifications to include intracellular mechanisms. The proposed model comprises two components: GeneCA, an NCA trained to develop distinct morphologies from seed cells containing immutable "gene" encodings, and GenePropCA, an auxiliary NCA that modulates the private "genetic" memory of cells without altering their visible states. This architecture enables the encoding and propagation of complex morphologies through the interaction of visible and private channels, facilitating the growth of diverse structures from a shared "genetic" substrate. EngramNCA supports the emergence of hierarchical and coexisting morphologies, offering insights into decentralized memory storage and transfer in artificial systems. These findings have potential implications for the development of adaptive, self-organizing systems and may contribute to the broader understanding of memory mechanisms in both biological and synthetic contexts.
How quantum and evolutionary algorithms can help each other: two examples
Aug 01, 2024We investigate the potential of bio-inspired evolutionary algorithms for designing quantum circuits with specific goals, focusing on two particular tasks. The first one is motivated by the ideas of Artificial Life that are used to reproduce stochastic cellular automata with given rules. We test the robustness of quantum implementations of the cellular automata for different numbers of quantum gates The second task deals with the sampling of quantum circuits that generate highly entangled quantum states, which constitute an important resource for quantum computing. In particular, an evolutionary algorithm is employed to optimize circuits with respect to a fitness function defined with the Mayer-Wallach entanglement measure. We demonstrate that, by balancing the mutation rate between exploration and exploitation, we can find entangling quantum circuits for up to five qubits. We also discuss the trade-off between the number of gates in quantum circuits and the computational costs of finding the gate arrangements leading to a strongly entangled state. Our findings provide additional insight into the trade-off between the complexity of a circuit and its performance, which is an important factor in the design of quantum circuits.
A Sensitivity Analysis of Cellular Automata and Heterogeneous Topology Networks: Partially-Local Cellular Automata and Homogeneous Homogeneous Random Boolean Networks
Jul 25, 2024Elementary Cellular Automata (ECA) are a well-studied computational universe that is, despite its simple configurations, capable of impressive computational variety. Harvesting this computation in a useful way has historically shown itself to be difficult, but if combined with reservoir computing (RC), this becomes much more feasible. Furthermore, RC and ECA enable energy-efficient AI, making the combination a promising concept for Edge AI. In this work, we contrast ECA to substrates of Partially-Local CA (PLCA) and Homogeneous Homogeneous Random Boolean Networks (HHRBN). They are, in comparison, the topological heterogeneous counterparts of ECA. This represents a step from ECA towards more biological-plausible substrates. We analyse these substrates by testing on an RC benchmark (5-bit memory), using Temporal Derrida plots to estimate the sensitivity and assess the defect collapse rate. We find that, counterintuitively, disordered topology does not necessarily mean disordered computation. There are countering computational "forces" of topology imperfections leading to a higher collapse rate (order) and yet, if accounted for, an increased sensitivity to the initial condition. These observations together suggest a shrinking critical range.
Information encoding and decoding in in-vitro neural networks on micro electrode arrays through stimulation timing
Apr 16, 2024A primary challenge in utilizing in-vitro biological neural networks for computations is finding good encoding and decoding schemes for inputting and decoding data to and from the networks. Furthermore, identifying the optimal parameter settings for a given combination of encoding and decoding schemes adds additional complexity to this challenge. In this study we explore stimulation timing as an encoding method, i.e. we encode information as the delay between stimulation pulses and identify the bounds and acuity of stimulation timings which produce linearly separable spike responses. We also examine the optimal readout parameters for a linear decoder in the form of epoch length, time bin size and epoch offset. Our results suggest that stimulation timings between 36 and 436ms may be optimal for encoding and that different combinations of readout parameters may be optimal at different parts of the evoked spike response.
Optimization of a Hydrodynamic Computational Reservoir through Evolution
Apr 20, 2023
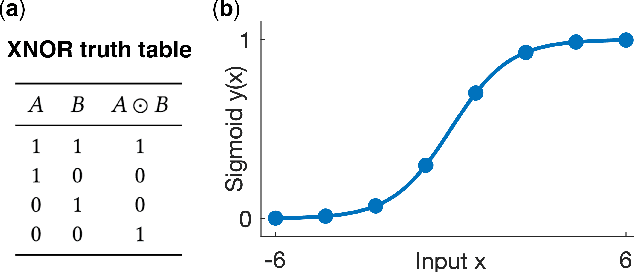


As demand for computational resources reaches unprecedented levels, research is expanding into the use of complex material substrates for computing. In this study, we interface with a model of a hydrodynamic system, under development by a startup, as a computational reservoir and optimize its properties using an evolution in materio approach. Input data are encoded as waves applied to our shallow water reservoir, and the readout wave height is obtained at a fixed detection point. We optimized the readout times and how inputs are mapped to the wave amplitude or frequency using an evolutionary search algorithm, with the objective of maximizing the system's ability to linearly separate observations in the training data by maximizing the readout matrix determinant. Applying evolutionary methods to this reservoir system substantially improved separability on an XNOR task, in comparison to implementations with hand-selected parameters. We also applied our approach to a regression task and show that our approach improves out-of-sample accuracy. Results from this study will inform how we interface with the physical reservoir in future work, and we will use these methods to continue to optimize other aspects of the physical implementation of this system as a computational reservoir.
Local learning through propagation delays in spiking neural networks
Oct 27, 2022We propose a novel local learning rule for spiking neural networks in which spike propagation times undergo activity-dependent plasticity. Our plasticity rule aligns pre-synaptic spike times to produce a stronger and more rapid response. Inputs are encoded by latency coding and outputs decoded by matching similar patterns of output spiking activity. We demonstrate the use of this method in a three-layer feedfoward network with inputs from a database of handwritten digits. Networks consistently improve their classification accuracy after training, and training with this method also allowed networks to generalize to an input class unseen during training. Our proposed method takes advantage of the ability of spiking neurons to support many different time-locked sequences of spikes, each of which can be activated by different input activations. The proof-of-concept shown here demonstrates the great potential for local delay learning to expand the memory capacity and generalizability of spiking neural networks.
Assessing the robustness of critical behavior in stochastic cellular automata
Aug 01, 2022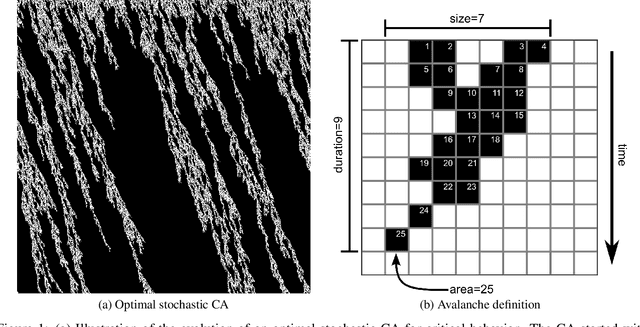
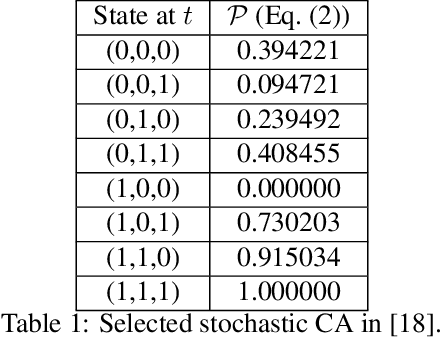
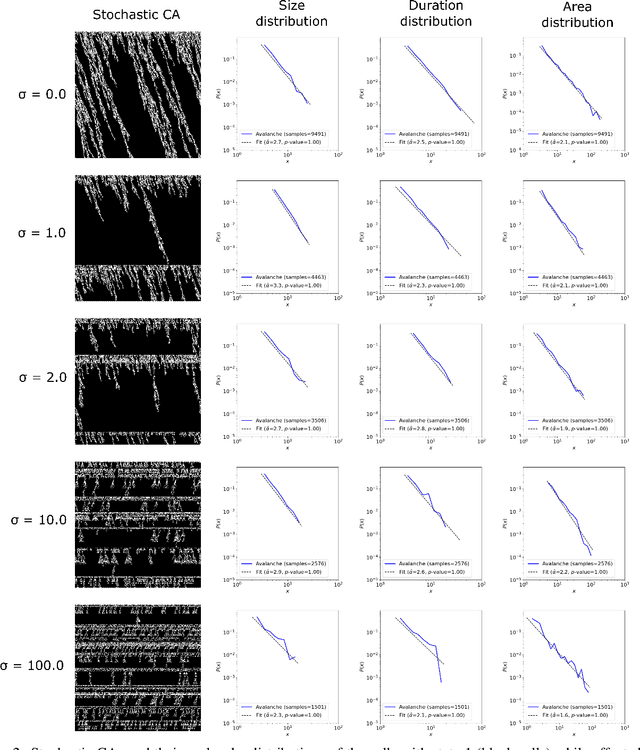
There is evidence that biological systems, such as the brain, work at a critical regime robust to noise, and are therefore able to remain in it under perturbations. In this work, we address the question of robustness of critical systems to noise. In particular, we investigate the robustness of stochastic cellular automata (CAs) at criticality. A stochastic CA is one of the simplest stochastic models showing criticality. The transition state of stochastic CA is defined through a set of probabilities. We systematically perturb the probabilities of an optimal stochastic CA known to produce critical behavior, and we report that such a CA is able to remain in a critical regime up to a certain degree of noise. We present the results using error metrics of the resulting power-law fitting, such as Kolmogorov-Smirnov statistic and Kullback-Leibler divergence. We discuss the implication of our results in regards to future realization of brain-inspired artificial intelligence systems.
Towards the Neuroevolution of Low-level Artificial General Intelligence
Jul 27, 2022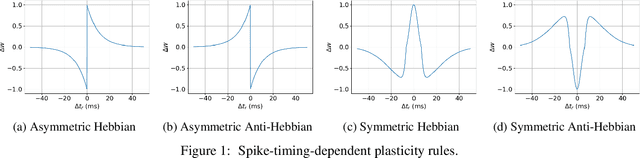
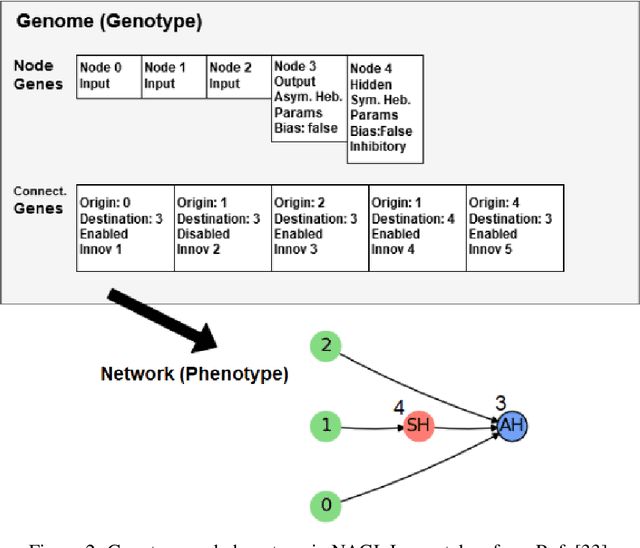
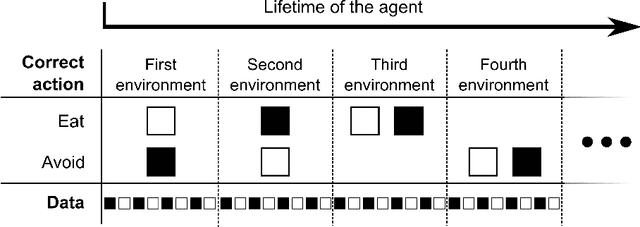
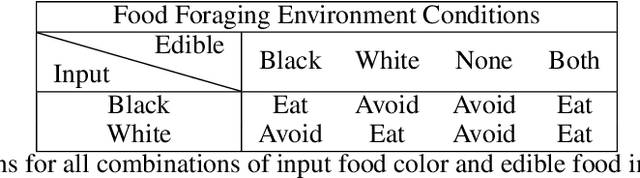
In this work, we argue that the search for Artificial General Intelligence (AGI) should start from a much lower level than human-level intelligence. The circumstances of intelligent behavior in nature resulted from an organism interacting with its surrounding environment, which could change over time and exert pressure on the organism to allow for learning of new behaviors or environment models. Our hypothesis is that learning occurs through interpreting sensory feedback when an agent acts in an environment. For that to happen, a body and a reactive environment are needed. We evaluate a method to evolve a biologically-inspired artificial neural network that learns from environment reactions named Neuroevolution of Artificial General Intelligence (NAGI), a framework for low-level AGI. This method allows the evolutionary complexification of a randomly-initialized spiking neural network with adaptive synapses, which controls agents instantiated in mutable environments. Such a configuration allows us to benchmark the adaptivity and generality of the controllers. The chosen tasks in the mutable environments are food foraging, emulation of logic gates, and cart-pole balancing. The three tasks are successfully solved with rather small network topologies and therefore it opens up the possibility of experimenting with more complex tasks and scenarios where curriculum learning is beneficial.