 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergence of Implicit World Models from Mortal Agents
Nov 19, 2024We discuss the possibility of world models and active exploration as emergent properties of open-ended behavior optimization in autonomous agents. In discussing the source of the open-endedness of living things, we start from the perspective of biological systems as understood by the mechanistic approach of theoretical biology and artificial life. From this perspective, we discuss the potential of homeostasis in particular as an open-ended objective for autonomous agents and as a general, integrative extrinsic motivation. We then discuss the possibility of implicitly acquiring a world model and active exploration through the internal dynamics of a network, and a hypothetical architecture for this, by combining meta-reinforcement learning, which assumes domain adaptation as a system that achieves robust homeostasis.
Severe Damage Recovery in Evolving Soft Robots through Differentiable Programming
Jun 14, 2022Biological systems are very robust to morphological damage, but artificial systems (robots) are currently not. In this paper we present a system based on neural cellular automata, in which locomoting robots are evolved and then given the ability to regenerate their morphology from damage through gradient-based training. Our approach thus combines the benefits of evolution to discover a wide range of different robot morphologies, with the efficiency of supervised training for robustness through differentiable update rules. The resulting neural cellular automata are able to grow virtual robots capable of regaining more than 80\% of their functionality, even after severe types of morphological damage.
Investigating the impact of free energy based behavior on human in human-agent interaction
Jan 25, 2022Humans communicate non-verbally by sharing physical rhythms, such as nodding and gestures, to involve each other. This sharing of physicality creates a sense of unity and makes humans feel involved with others. In this paper, we developed a new body motion generation system based on the free-energy principle (FEP), which not only responds passively but also prompts human actions. The proposed system consists of two modules, the sampling module, and the motion selection module. We conducted a subjective experiment to evaluate the "feeling of interacting with the agent" of the FEP based behavior. The results suggested that FEP based behaviors show more "feeling of interacting with the agent". Furthermore, we confirmed that the agent's gestures elicited subject gestures. This result not only reinforces the impression of feeling interaction but could also realization of agents that encourage people to change their behavior.
Regenerating Soft Robots through Neural Cellular Automata
Feb 07, 2021


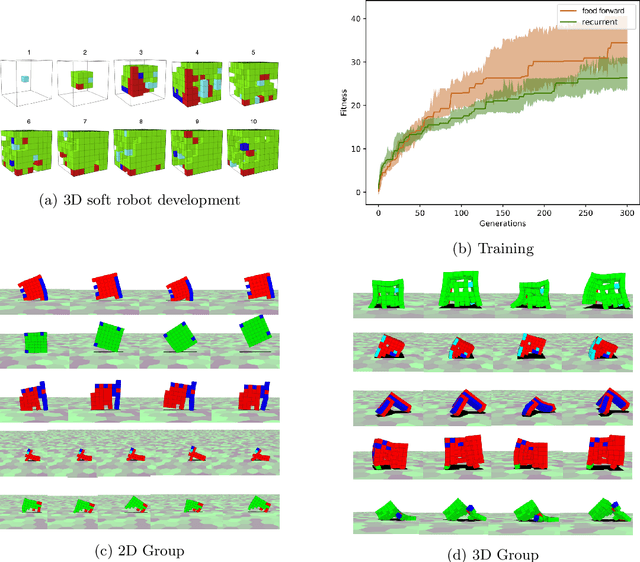
Morphological regeneration is an important feature that highlights the environmental adaptive capacity of biological systems. Lack of this regenerative capacity significantly limits the resilience of machines and the environments they can operate in. To aid in addressing this gap, we develop an approach for simulated soft robots to regrow parts of their morphology when being damaged. Although numerical simulations using soft robots have played an important role in their design, evolving soft robots with regenerative capabilities have so far received comparable little attention. Here we propose a model for soft robots that regenerate through a neural cellular automata. Importantly, this approach only relies on local cell information to regrow damaged components, opening interesting possibilities for physical regenerable soft robots in the future. Our approach allows simulated soft robots that are damaged to partially regenerate their original morphology through local cell interactions alone and regain some of their ability to locomote. These results take a step towards equipping artificial systems with regenerative capacities and could potentially allow for more robust operations in a variety of situations and environments. The code for the experiments in this paper is available at: \url{github.com/KazuyaHoribe/RegeneratingSoftRobots}.