 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the impact of free energy based behavior on human in human-agent interaction
Jan 25, 2022Humans communicate non-verbally by sharing physical rhythms, such as nodding and gestures, to involve each other. This sharing of physicality creates a sense of unity and makes humans feel involved with others. In this paper, we developed a new body motion generation system based on the free-energy principle (FEP), which not only responds passively but also prompts human actions. The proposed system consists of two modules, the sampling module, and the motion selection module. We conducted a subjective experiment to evaluate the "feeling of interacting with the agent" of the FEP based behavior. The results suggested that FEP based behaviors show more "feeling of interacting with the agent". Furthermore, we confirmed that the agent's gestures elicited subject gestures. This result not only reinforces the impression of feeling interaction but could also realization of agents that encourage people to change their behavior.
Intrinsically motivated reinforcement learning for human-robot interaction in the real-world
Apr 14, 2018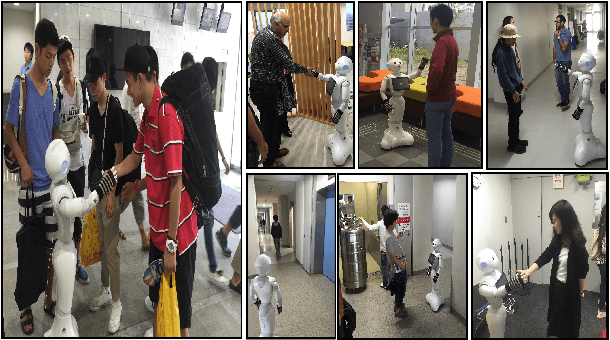
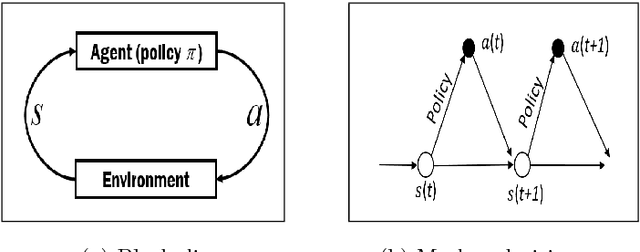

For a natural social human-robot interaction, it is essential for a robot to learn the human-like social skills. However, learning such skills is notoriously hard due to the limited availability of direct instructions from people to teach a robot. In this paper, we propose an intrinsically motivated reinforcement learning framework in which an agent gets the intrinsic motivation-based rewards through the action-conditional predictive model. By using the proposed method, the robot learned the social skills from the human-robot interaction experiences gathered in the real uncontrolled environments. The results indicate that the robot not only acquired human-like social skills but also took more human-like decisions, on a test dataset, than a robot which received direct rewards for the task achievement.
Show, Attend and Interact: Perceivable Human-Robot Social Interaction through Neural Attention Q-Network
Feb 28, 2017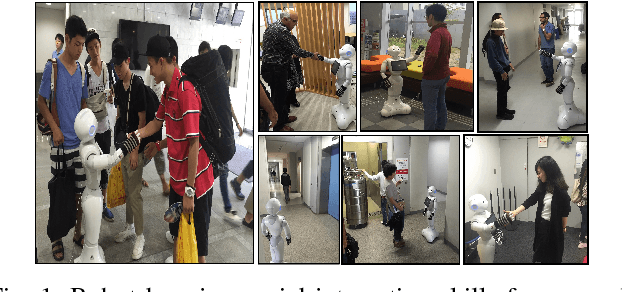


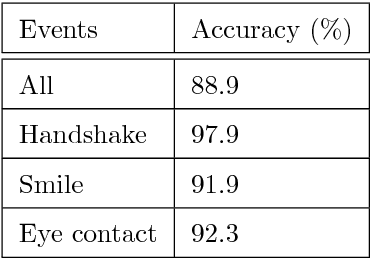
For a safe, natural and effective human-robot social interaction, it is essential to develop a system that allows a robot to demonstrate the perceivable responsive behaviors to complex human behaviors. We introduce the Multimodal Deep Attention Recurrent Q-Network using which the robot exhibits human-like social interaction skills after 14 days of interacting with people in an uncontrolled real world. Each and every day during the 14 days, the system gathered robot interaction experiences with people through a hit-and-trial method and then trained the MDARQN on these experiences using end-to-end reinforcement learning approach. The results of interaction based learning indicate that the robot has learned to respond to complex human behaviors in a perceivable and socially acceptable manner.
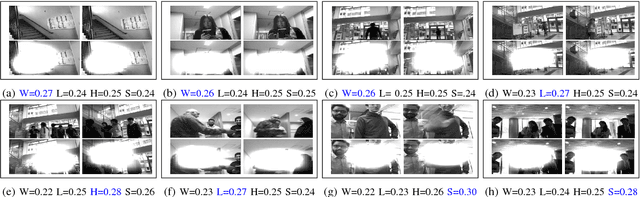
Robot gains Social Intelligence through Multimodal Deep Reinforcement Learning
Feb 24, 2017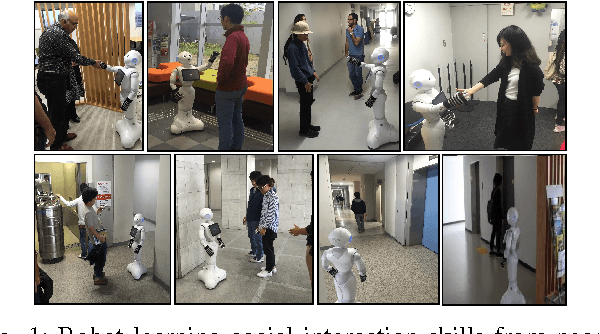
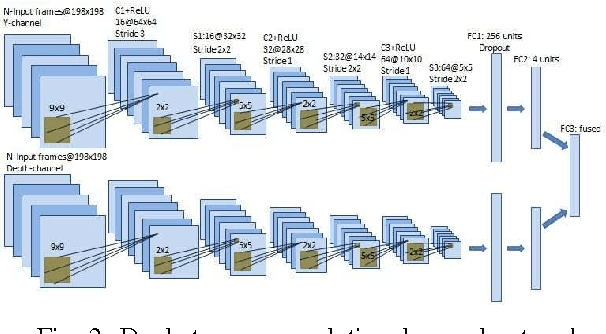
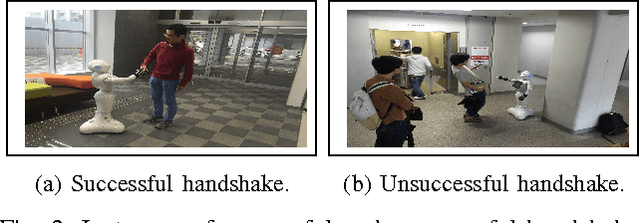
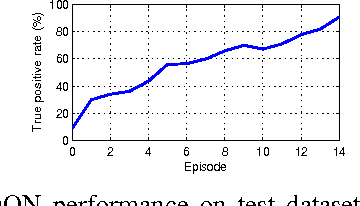
For robots to coexist with humans in a social world like ours, it is crucial that they possess human-like social interaction skills. Programming a robot to possess such skills is a challenging task. In this paper, we propose a Multimodal Deep Q-Network (MDQN) to enable a robot to learn human-like interaction skills through a trial and error method. This paper aims to develop a robot that gathers data during its interaction with a human and learns human interaction behaviour from the high-dimensional sensory information using end-to-end reinforcement learning. This paper demonstrates that the robot was able to learn basic interaction skills successfully, after 14 days of interacting with people.