 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMegBA: A High-Performance and Distributed Library for Large-Scale Bundle Adjustment
Dec 10, 2021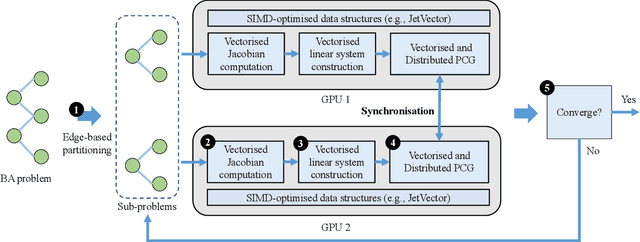
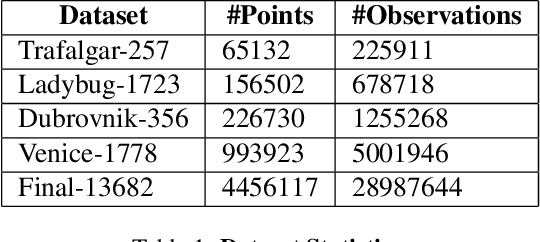
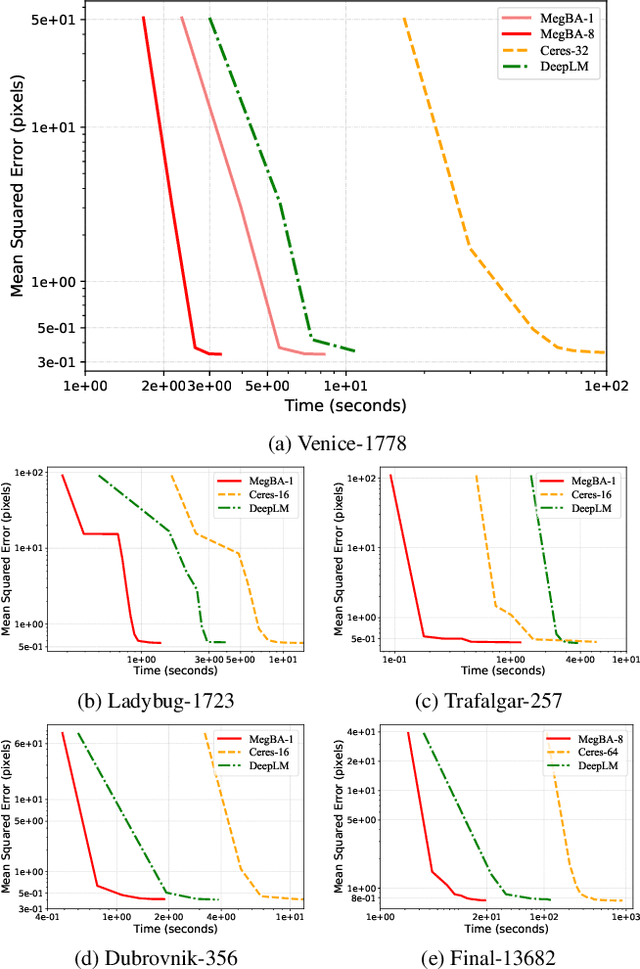
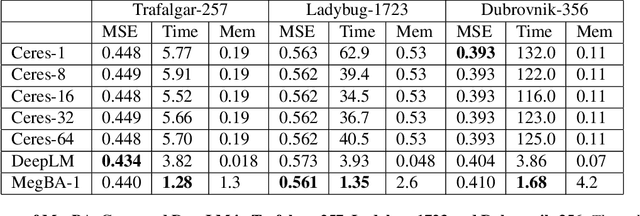
Large-scale Bundle Adjustment (BA) is the key for many 3D vision applications (e.g., Structure-from-Motion and SLAM). Though important, large-scale BA is still poorly supported by existing BA libraries (e.g., Ceres and g2o). These libraries under-utilise accelerators (i.e., GPUs), and they lack algorithms to distribute BA computation constrained by the memory on a single device. In this paper, we propose MegBA, a high-performance and distributed library for large-scale BA. MegBA has a novel end-to-end vectorised BA algorithm that can fully exploit the massive parallel cores on GPUs, thus speeding up the entire BA computation. It also has a novel distributed BA algorithm that can automatically partition BA problems, and solve BA sub-problems using distributed GPUs. The GPUs synchronise intermediate solving state using network-efficient collective communication, and the synchronisation is designed to minimise communication cost. MegBA has a memory-efficient GPU runtime and exposes g2o-compatible APIs. Experiments show that MegBA can out-perform state-of-the-art BA libraries (i.e., Ceres and DeepLM) by up to 47.6x and 6.4x respectively, in public large-scale BA benchmarks. The code of MegBA is available at: https://github.com/MegviiRobot/MegBA.
Deep Reinforcement Learning for Autonomous Internet of Things: Model, Applications and Challenges
Jul 22, 2019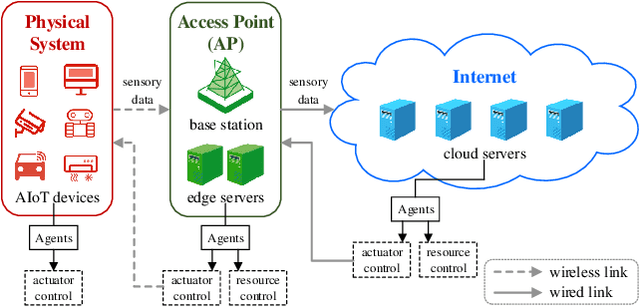
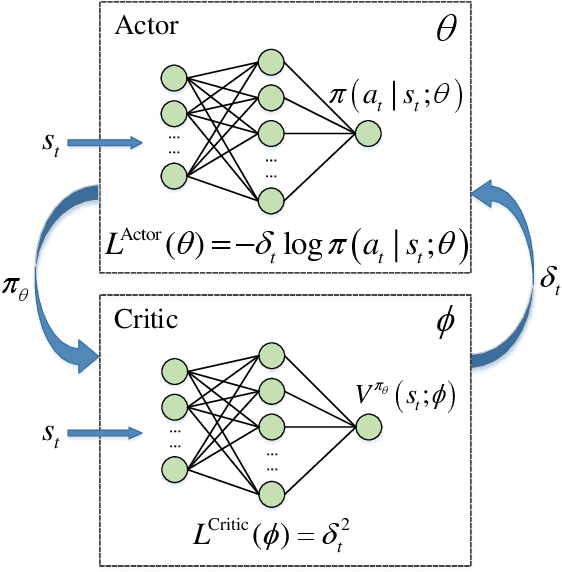
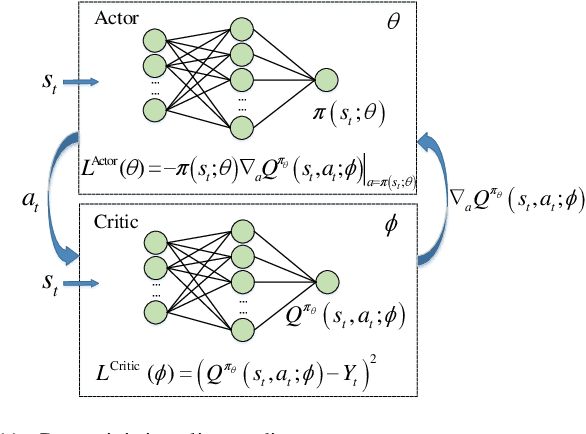
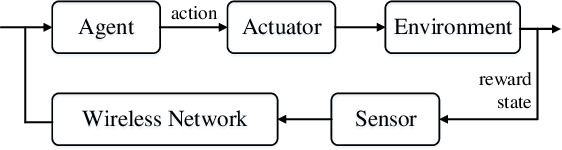
The Internet of Things (IoT) extends the Internet connectivity into billions of IoT devices around the world, which collect and share information to reflect the status of physical world. The Autonomous Control System (ACS), on the other hand, performs control functions on the physical systems without external intervention over an extended period of time. The integration of IoT and ACS results in a new concept - autonomous IoT (AIoT). The sensors collect information on the system status, based on which intelligent agents in IoT devices as well as Edge/Fog/Cloud servers make control decisions for the actuators to react. In order to achieve autonomy, a promising method is for the intelligent agents to leverage the techniques in the field of artificial intelligence, especially reinforcement learning (RL) and deep reinforcement learning (DRL) for decision making. In this paper, we first provide comprehensive survey of the state-of-art research, and then propose a general model for the applications of RL/DRL in AIoT. Finally, the challenges and open issues for future research are identified.
A Driving Intention Prediction Method Based on Hidden Markov Model for Autonomous Driving
Feb 25, 2019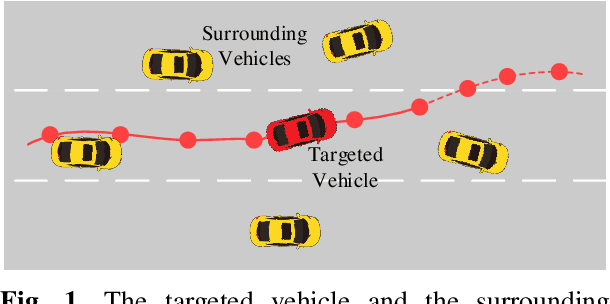
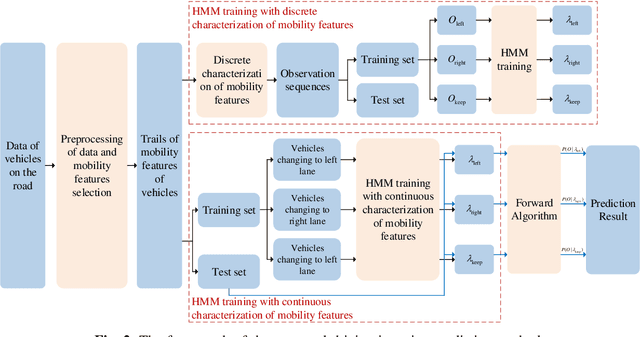
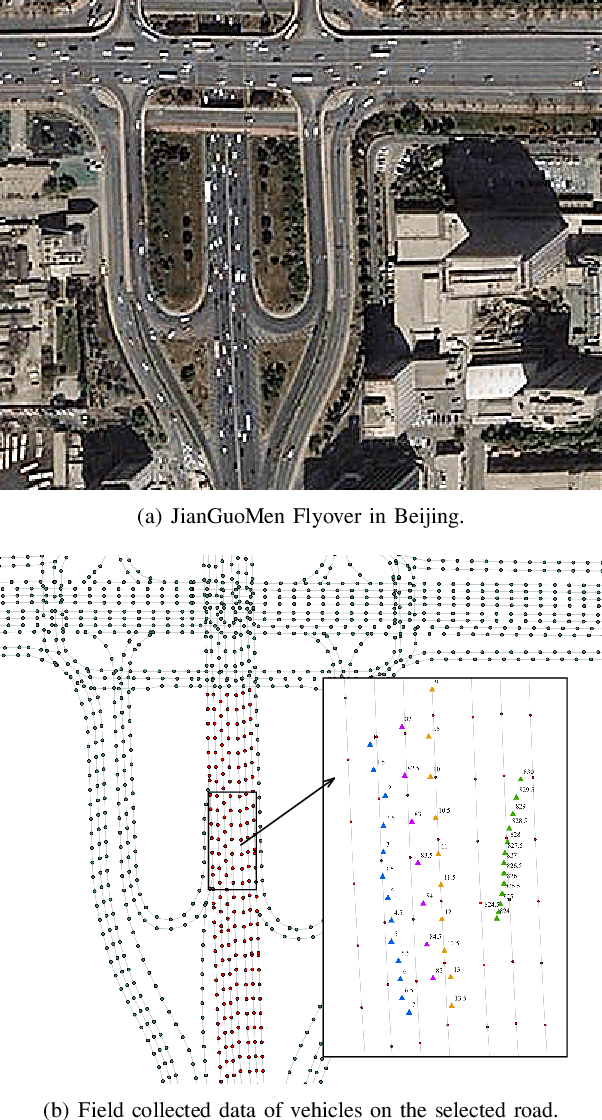
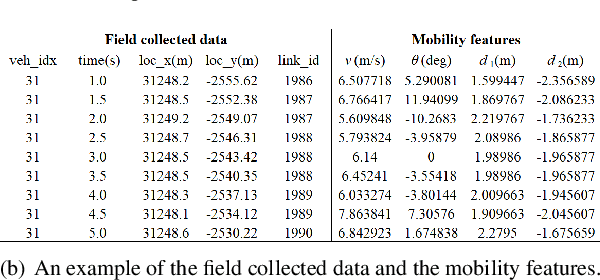
In a mixed-traffic scenario where both autonomous vehicles and human-driving vehicles exist, a timely prediction of driving intentions of nearby human-driving vehicles is essential for the safe and efficient driving of an autonomous vehicle. In this paper, a driving intention prediction method based on Hidden Markov Model (HMM) is proposed for autonomous vehicles. HMMs representing different driving intentions are trained and tested with field collected data from a flyover. When training the models, either discrete or continuous characterization of the mobility features of vehicles is applied. Experimental results show that the HMMs trained with the continuous characterization of mobility features can give a higher prediction accuracy when they are used for predicting driving intentions. Moreover, when the surrounding traffic of the vehicle is taken into account, the performances of the proposed prediction method are further improved.