 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Driving Intention Prediction Method Based on Hidden Markov Model for Autonomous Driving
Paper and Code
Feb 25, 2019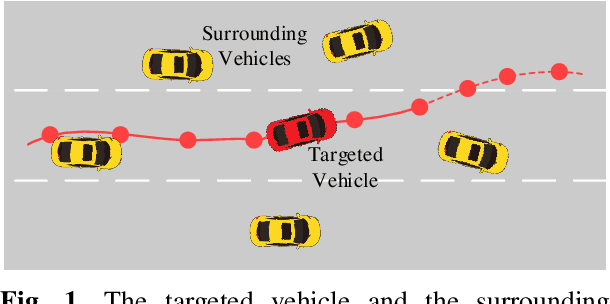
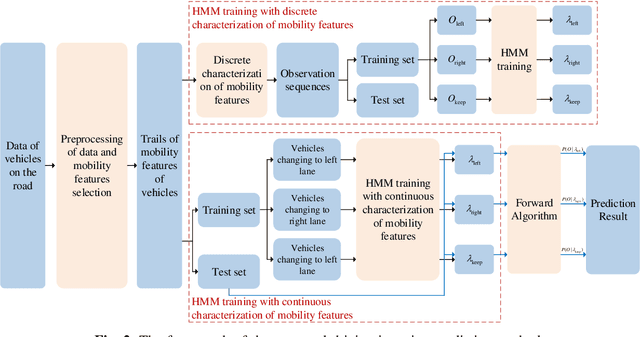
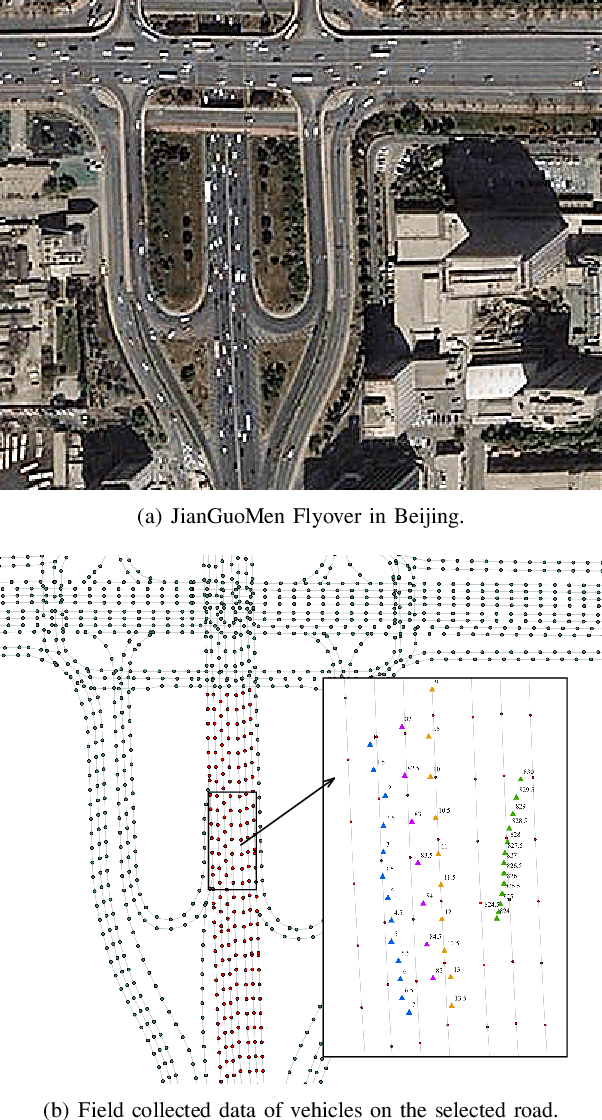
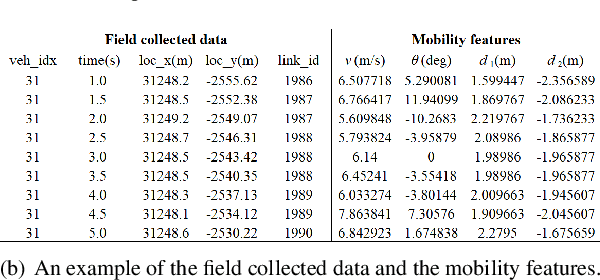
In a mixed-traffic scenario where both autonomous vehicles and human-driving vehicles exist, a timely prediction of driving intentions of nearby human-driving vehicles is essential for the safe and efficient driving of an autonomous vehicle. In this paper, a driving intention prediction method based on Hidden Markov Model (HMM) is proposed for autonomous vehicles. HMMs representing different driving intentions are trained and tested with field collected data from a flyover. When training the models, either discrete or continuous characterization of the mobility features of vehicles is applied. Experimental results show that the HMMs trained with the continuous characterization of mobility features can give a higher prediction accuracy when they are used for predicting driving intentions. Moreover, when the surrounding traffic of the vehicle is taken into account, the performances of the proposed prediction method are further improved.