 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWork-in-Progress: Function-as-Subtask API Replacing Publish/Subscribe for OS-Native DAG Scheduling
Nov 11, 2025The Directed Acyclic Graph (DAG) task model for real-time scheduling finds its primary practical target in Robot Operating System 2 (ROS 2). However, ROS 2's publish/subscribe API leaves DAG precedence constraints unenforced: a callback may publish mid-execution, and multi-input callbacks let developers choose topic-matching policies. Thus preserving DAG semantics relies on conventions; once violated, the model collapses. We propose the Function-as-Subtask (FasS) API, which expresses each subtask as a function whose arguments/return values are the subtask's incoming/outgoing edges. By minimizing description freedom, DAG semantics is guaranteed at the API rather than by programmer discipline. We implement a DAG-native scheduler using FasS on a Rust-based experimental kernel and evaluate its semantic fidelity, and we outline design guidelines for applying FasS to Linux Linux sched_ext.
Work in Progress: Middleware-Transparent Callback Enforcement in Commoditized Component-Oriented Real-time Systems
May 10, 2025Real-time scheduling in commoditized component-oriented real-time systems, such as ROS 2 systems on Linux, has been studied under nested scheduling: OS thread scheduling and middleware layer scheduling (e.g., ROS 2 Executor). However, by establishing a persistent one-to-one correspondence between callbacks and OS threads, we can ignore the middleware layer and directly apply OS scheduling parameters (e.g., scheduling policy, priority, and affinity) to individual callbacks. We propose a middleware model that enables this idea and implements CallbackIsolatedExecutor as a novel ROS 2 Executor. We demonstrate that the costs (user-kernel switches, context switches, and memory usage) of CallbackIsolatedExecutor remain lower than those of the MultiThreadedExecutor, regardless of the number of callbacks. Additionally, the cost of CallbackIsolatedExecutor relative to SingleThreadedExecutor stays within a fixed ratio (1.4x for inter-process and 5x for intra-process communication). Future ROS 2 real-time scheduling research can avoid nested scheduling, ignoring the existence of the middleware layer.
* 4 pages, 5 figures. Accepted for IEEE RTAS 2025; this is the author-accepted manuscript. Final version in IEEE Xplore: https://doi.org/10.1109/RTAS65571.2025.00017
Moment-based Kalman Filter: Nonlinear Kalman Filtering with Exact Moment Propagation
Jan 22, 2023
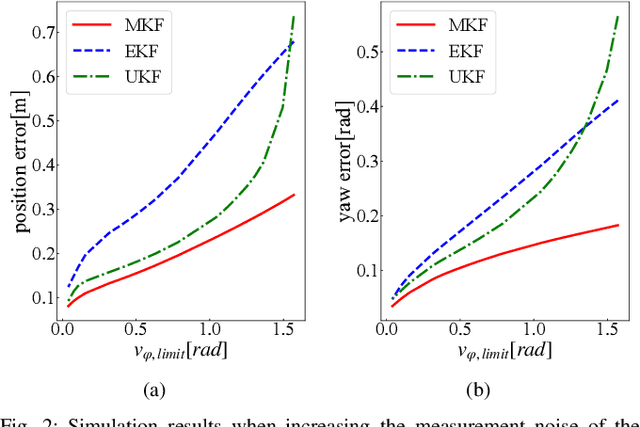
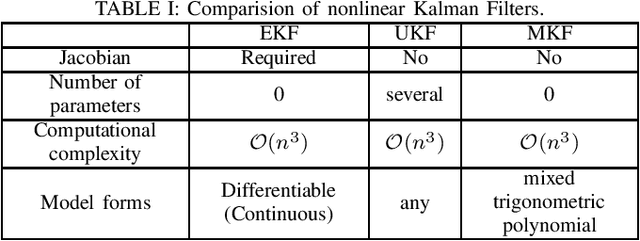

This paper develops a new nonlinear filter, called Moment-based Kalman Filter (MKF), using the exact moment propagation method. Existing state estimation methods use linearization techniques or sampling points to compute approximate values of moments. However, moment propagation of probability distributions of random variables through nonlinear process and measurement models play a key role in the development of state estimation and directly affects their performance. The proposed moment propagation procedure can compute exact moments for non-Gaussian as well as non-independent Gaussian random variables. Thus, MKF can propagate exact moments of uncertain state variables up to any desired order. MKF is derivative-free and does not require tuning parameters. Moreover, MKF has the same computation time complexity as the extended or unscented Kalman filters, i.e., EKF and UKF. The experimental evaluations show that MKF is the preferred filter in comparison to EKF and UKF and outperforms both filters in non-Gaussian noise regimes.
Jerk Constrained Velocity Planning for an Autonomous Vehicle: Linear Programming Approach
Feb 21, 2022
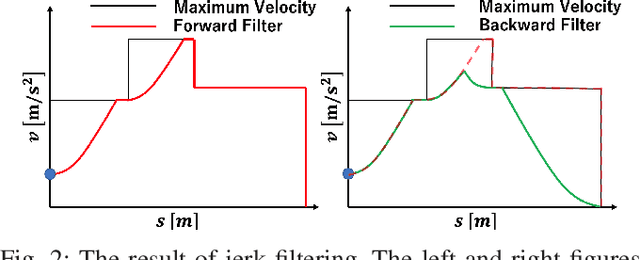
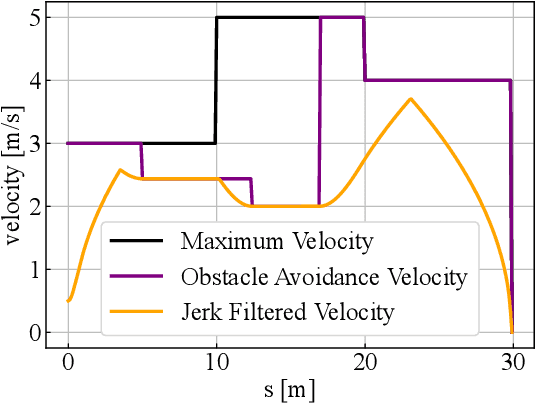
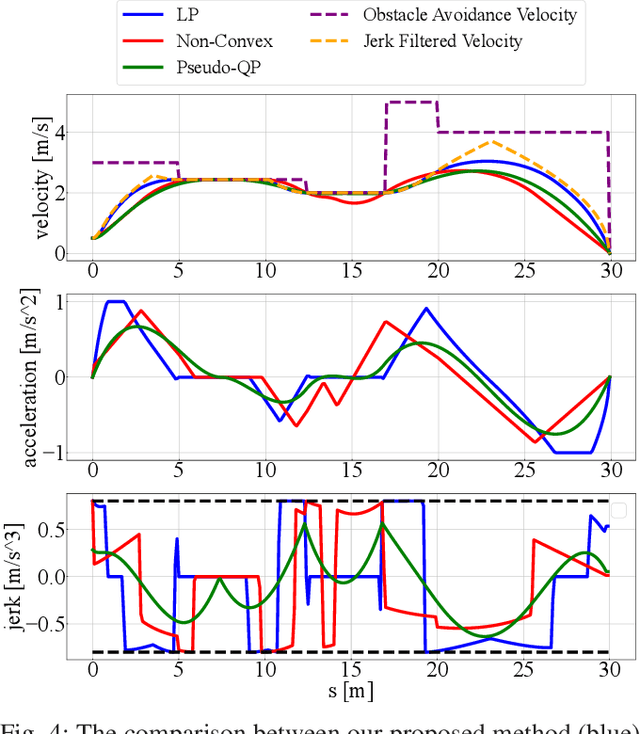
Velocity Planning for self-driving vehicles in a complex environment is one of the most challenging tasks. It must satisfy the following three requirements: safety with regards to collisions; respect of the maximum velocity limits defined by the traffic rules; comfort of the passengers. In order to achieve these goals, the jerk and dynamic objects should be considered, however, it makes the problem as complex as a non-convex optimization problem. In this paper, we propose a linear programming (LP) based velocity planning method with jerk limit and obstacle avoidance constraints for an autonomous driving system. To confirm the efficiency of the proposed method, a comparison is made with several optimization-based approaches, and we show that our method can generate a velocity profile which satisfies the aforementioned requirements more efficiently than the compared methods. In addition, we tested our algorithm on a real vehicle at a test field to validate the effectiveness of the proposed method.
Characterization of Multiple 3D LiDARs for Localization and Mapping using Normal Distributions Transform
Apr 03, 2020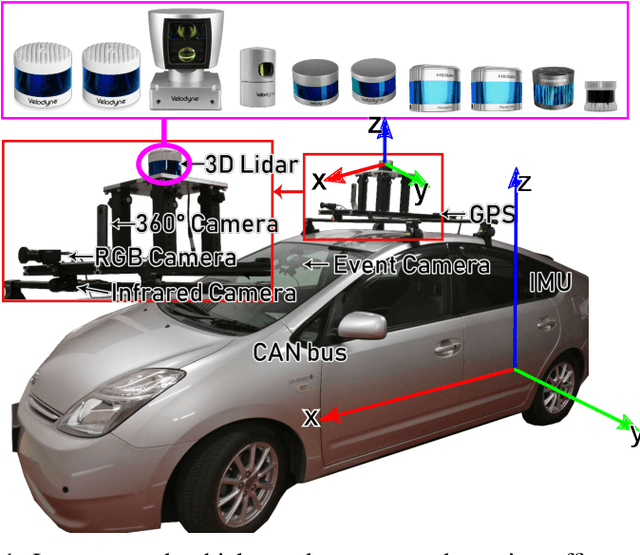

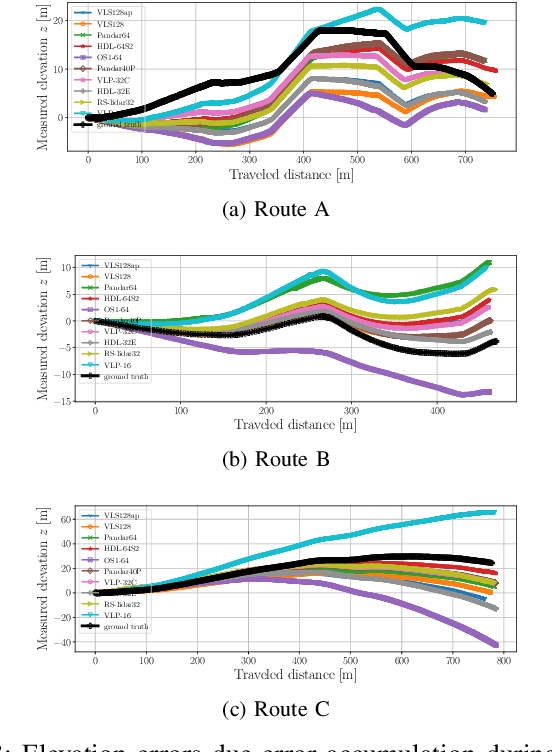
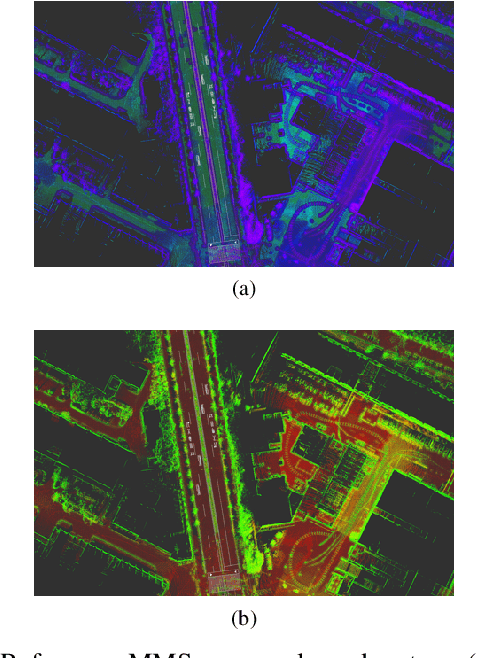
In this work, we present a detailed comparison of ten different 3D LiDAR sensors, covering a range of manufacturers, models, and laser configurations, for the tasks of mapping and vehicle localization, using as common reference the Normal Distributions Transform (NDT) algorithm implemented in the self-driving open source platform Autoware. LiDAR data used in this study is a subset of our LiDAR Benchmarking and Reference (LIBRE) dataset, captured independently from each sensor, from a vehicle driven on public urban roads multiple times, at different times of the day. In this study, we analyze the performance and characteristics of each LiDAR for the tasks of (1) 3D mapping including an assessment map quality based on mean map entropy, and (2) 6-DOF localization using a ground truth reference map.
LIBRE: The Multiple 3D LiDAR Dataset
Mar 13, 2020

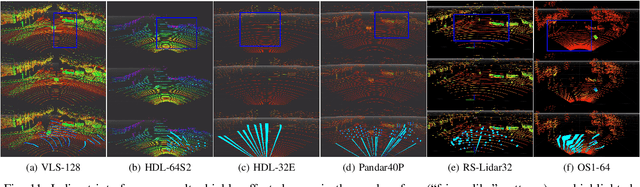
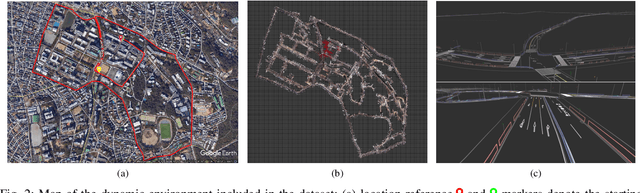
In this work, we present LIBRE: LiDAR Benchmarking and Reference, a first-of-its-kind dataset featuring 12 different LiDAR sensors, covering a range of manufacturers, models, and laser configurations. Data captured independently from each sensor includes four different environments and configurations: static obstacles placed at known distances and measured from a fixed position within a controlled environment; static obstacles measured from a moving vehicle, captured in a weather chamber where LiDARs were exposed to different conditions (fog, rain, strong light); dynamic objects actively measured from a fixed position by multiple LiDARs mounted side-by-side simultaneously, creating indirect interference conditions; and dynamic traffic objects captured from a vehicle driven on public urban roads multiple times at different times of the day, including data from supporting sensors such as cameras, infrared imaging, and odometry devices. LIBRE will contribute the research community to (1) provide a means for a fair comparison of currently available LiDARs, and (2) facilitate the improvement of existing self-driving vehicles and robotics-related software, in terms of development and tuning of LiDAR-based perception algorithms.
LMNet: Real-time Multiclass Object Detection on CPU using 3D LiDAR
May 18, 2018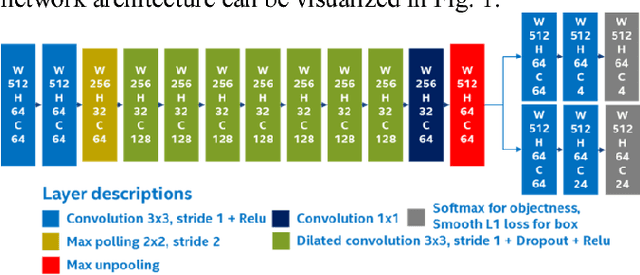
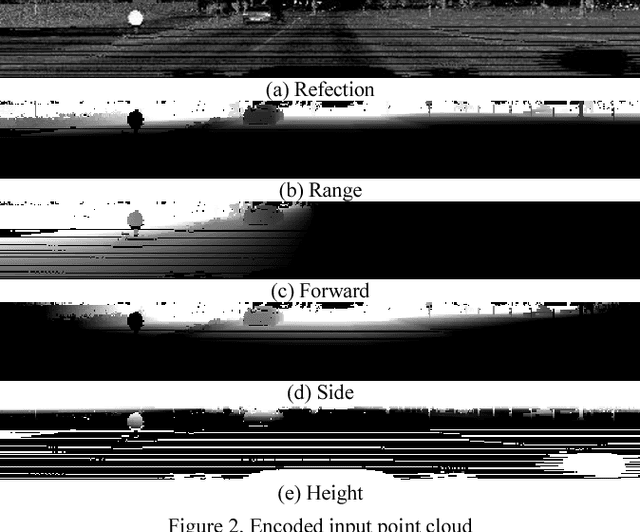
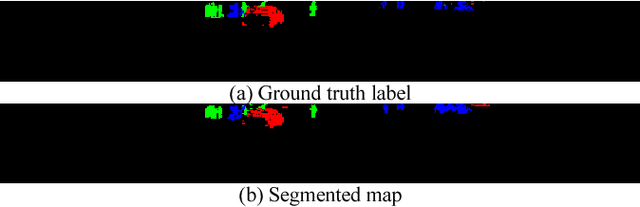
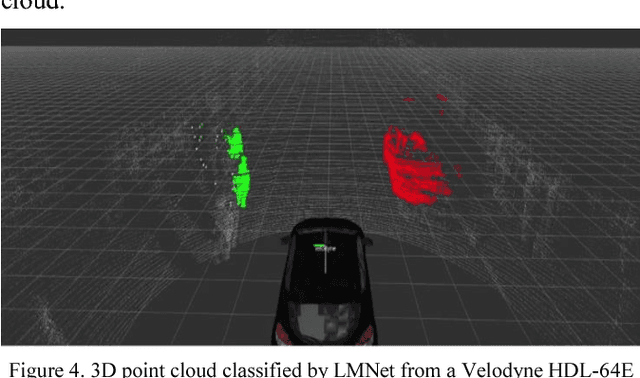
This paper describes an optimized single-stage deep convolutional neural network to detect objects in urban environments, using nothing more than point cloud data. This feature enables our method to work regardless the time of the day and the lighting conditions.The proposed network structure employs dilated convolutions to gradually increase the perceptive field as depth increases, this helps to reduce the computation time by about 30%. The network input consists of five perspective representations of the unorganized point cloud data. The network outputs an objectness map and the bounding box offset values for each point. Our experiments showed that using reflection, range, and the position on each of the three axes helped to improve the location and orientation of the output bounding box. We carried out quantitative evaluations with the help of the KITTI dataset evaluation server. It achieved the fastest processing speed among the other contenders, making it suitable for real-time applications. We implemented and tested it on a real vehicle with a Velodyne HDL-64 mounted on top of it. We achieved execution times as fast as 50 FPS using desktop GPUs, and up to 10 FPS on a single Intel Core i5 CPU. The deploy implementation is open-sourced and it can be found as a feature branch inside the autonomous driving framework Autoware. Code is available at: https://github.com/CPFL/Autoware/tree/feature/cnn_lidar_detection