 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJerk Constrained Velocity Planning for an Autonomous Vehicle: Linear Programming Approach
Feb 21, 2022
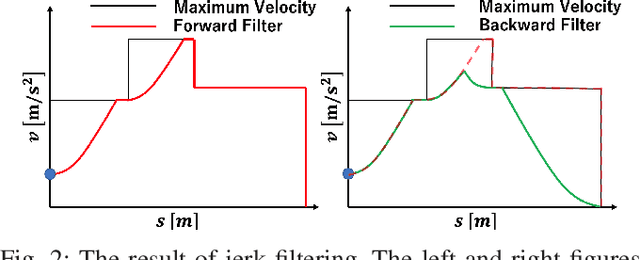
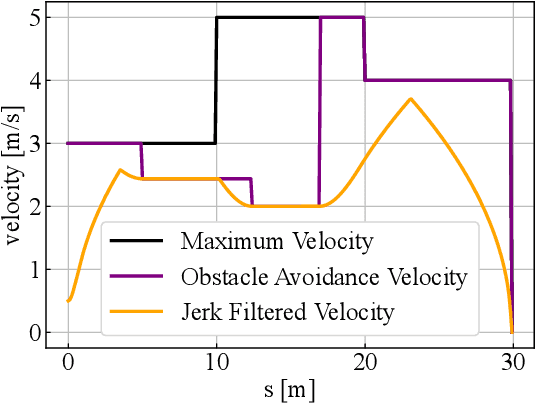
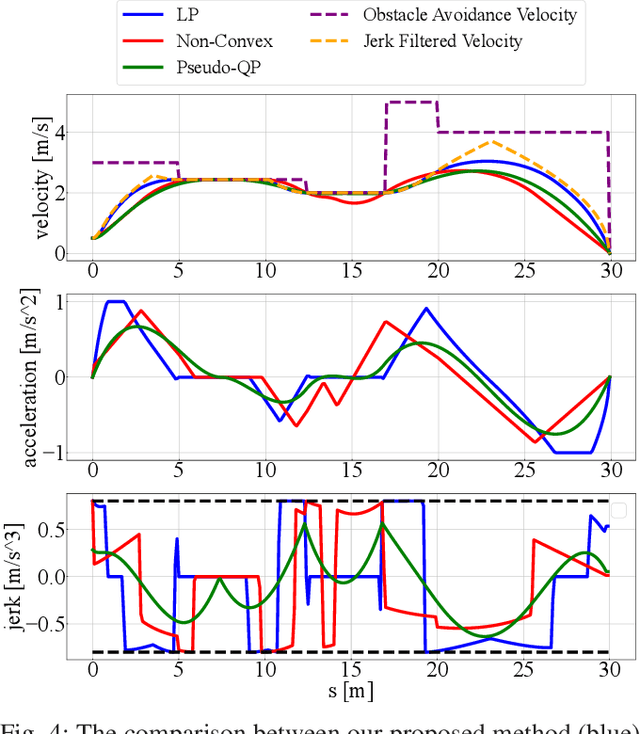
Velocity Planning for self-driving vehicles in a complex environment is one of the most challenging tasks. It must satisfy the following three requirements: safety with regards to collisions; respect of the maximum velocity limits defined by the traffic rules; comfort of the passengers. In order to achieve these goals, the jerk and dynamic objects should be considered, however, it makes the problem as complex as a non-convex optimization problem. In this paper, we propose a linear programming (LP) based velocity planning method with jerk limit and obstacle avoidance constraints for an autonomous driving system. To confirm the efficiency of the proposed method, a comparison is made with several optimization-based approaches, and we show that our method can generate a velocity profile which satisfies the aforementioned requirements more efficiently than the compared methods. In addition, we tested our algorithm on a real vehicle at a test field to validate the effectiveness of the proposed method.