 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterization of Multiple 3D LiDARs for Localization and Mapping using Normal Distributions Transform
Apr 03, 2020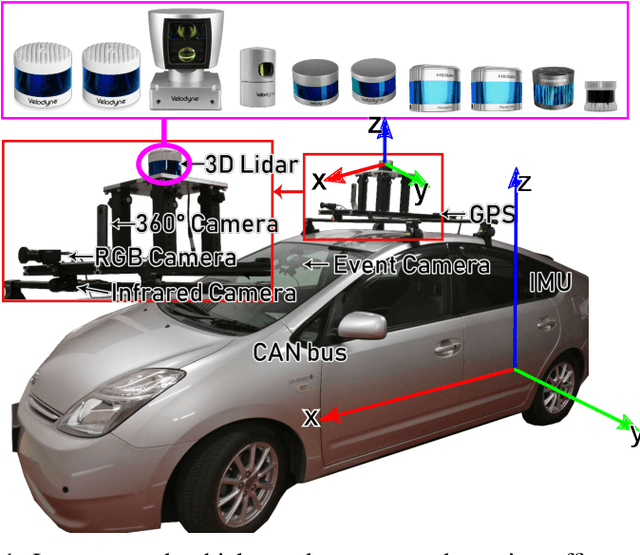

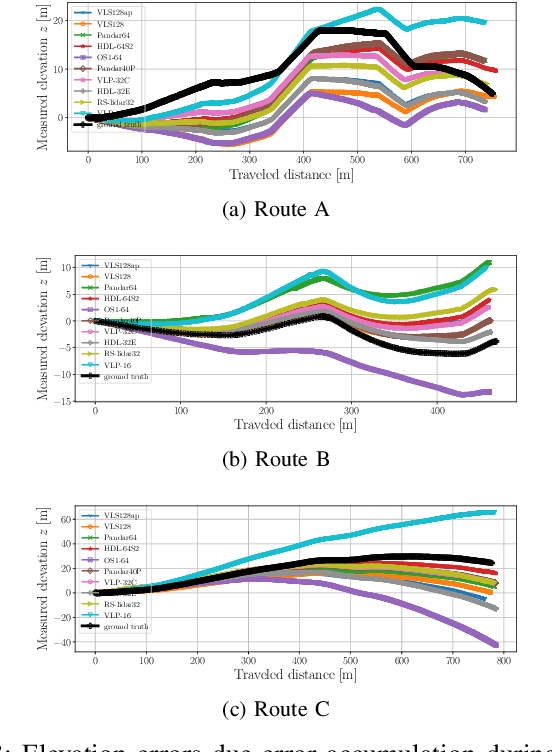
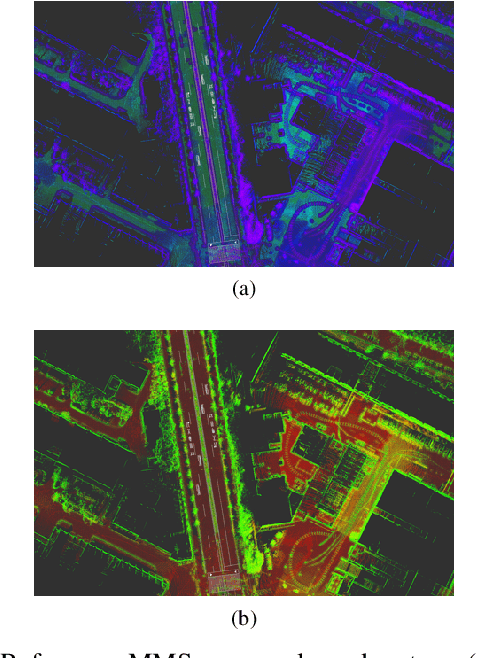
In this work, we present a detailed comparison of ten different 3D LiDAR sensors, covering a range of manufacturers, models, and laser configurations, for the tasks of mapping and vehicle localization, using as common reference the Normal Distributions Transform (NDT) algorithm implemented in the self-driving open source platform Autoware. LiDAR data used in this study is a subset of our LiDAR Benchmarking and Reference (LIBRE) dataset, captured independently from each sensor, from a vehicle driven on public urban roads multiple times, at different times of the day. In this study, we analyze the performance and characteristics of each LiDAR for the tasks of (1) 3D mapping including an assessment map quality based on mean map entropy, and (2) 6-DOF localization using a ground truth reference map.
LIBRE: The Multiple 3D LiDAR Dataset
Mar 13, 2020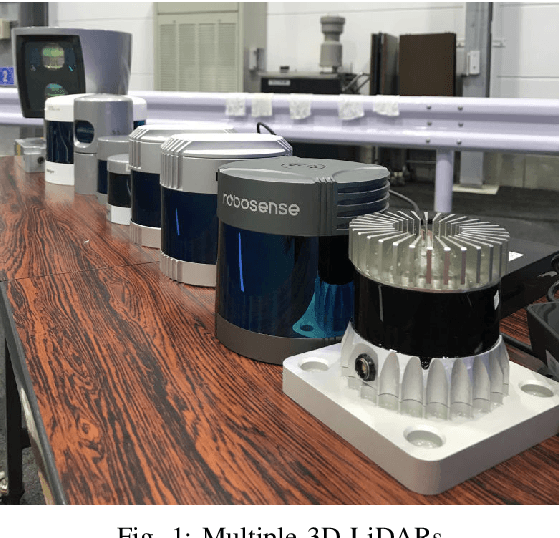

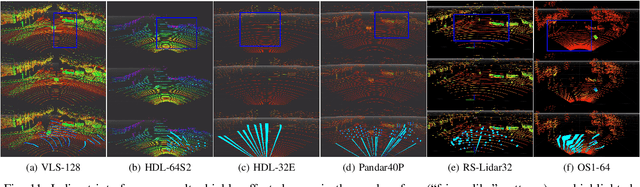
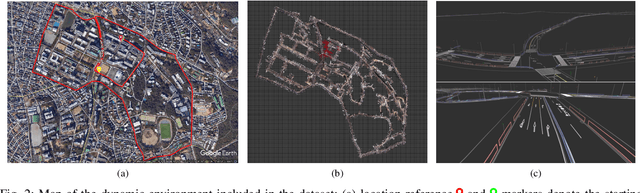
In this work, we present LIBRE: LiDAR Benchmarking and Reference, a first-of-its-kind dataset featuring 12 different LiDAR sensors, covering a range of manufacturers, models, and laser configurations. Data captured independently from each sensor includes four different environments and configurations: static obstacles placed at known distances and measured from a fixed position within a controlled environment; static obstacles measured from a moving vehicle, captured in a weather chamber where LiDARs were exposed to different conditions (fog, rain, strong light); dynamic objects actively measured from a fixed position by multiple LiDARs mounted side-by-side simultaneously, creating indirect interference conditions; and dynamic traffic objects captured from a vehicle driven on public urban roads multiple times at different times of the day, including data from supporting sensors such as cameras, infrared imaging, and odometry devices. LIBRE will contribute the research community to (1) provide a means for a fair comparison of currently available LiDARs, and (2) facilitate the improvement of existing self-driving vehicles and robotics-related software, in terms of development and tuning of LiDAR-based perception algorithms.