 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFire SSD: Wide Fire Modules based Single Shot Detector on Edge Device
Oct 17, 2018



With the emergence of edge computing, there is an increasing need for running convolutional neural network based object detection on small form factor edge computing devices with limited compute and thermal budget for applications such as video surveillance. To address this problem, efficient object detection frameworks such as YOLO and SSD were proposed. However, SSD based object detection that uses VGG16 as backend network is insufficient to achieve real time speed on edge devices. To further improve the detection speed, the backend network is replaced by more efficient networks such as SqueezeNet and MobileNet. Although the speed is greatly improved, it comes with a price of lower accuracy. In this paper, we propose an efficient SSD named Fire SSD. Fire SSD achieves 70.7mAP on Pascal VOC 2007 test set. Fire SSD achieves the speed of 30.6FPS on low power mainstream CPU and is about 6 times faster than SSD300 and has about 4 times smaller model size. Fire SSD also achieves 22.2FPS on integrated GPU.
LMNet: Real-time Multiclass Object Detection on CPU using 3D LiDAR
May 18, 2018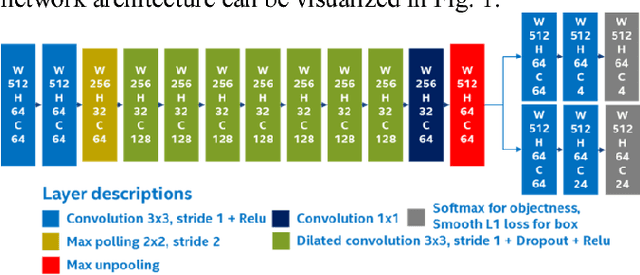
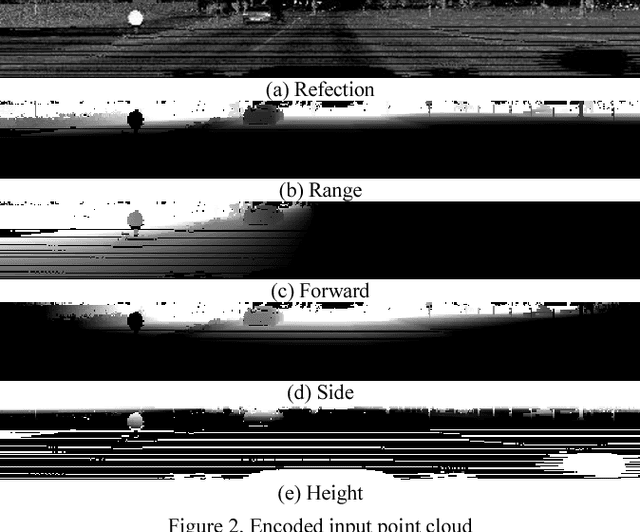
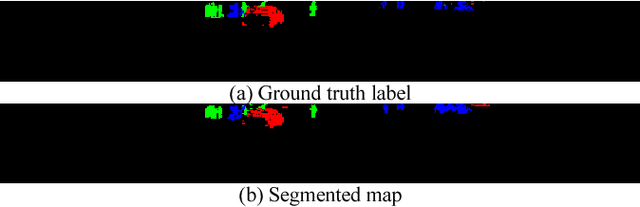
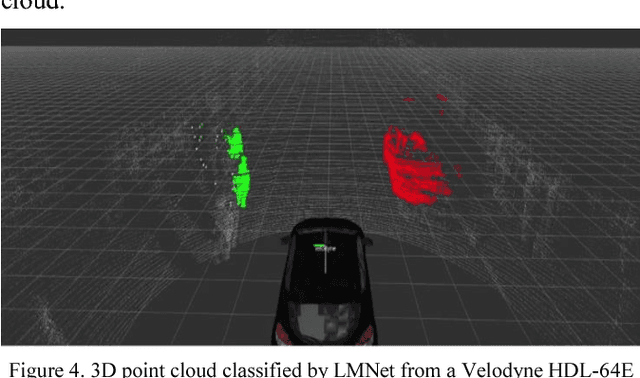
This paper describes an optimized single-stage deep convolutional neural network to detect objects in urban environments, using nothing more than point cloud data. This feature enables our method to work regardless the time of the day and the lighting conditions.The proposed network structure employs dilated convolutions to gradually increase the perceptive field as depth increases, this helps to reduce the computation time by about 30%. The network input consists of five perspective representations of the unorganized point cloud data. The network outputs an objectness map and the bounding box offset values for each point. Our experiments showed that using reflection, range, and the position on each of the three axes helped to improve the location and orientation of the output bounding box. We carried out quantitative evaluations with the help of the KITTI dataset evaluation server. It achieved the fastest processing speed among the other contenders, making it suitable for real-time applications. We implemented and tested it on a real vehicle with a Velodyne HDL-64 mounted on top of it. We achieved execution times as fast as 50 FPS using desktop GPUs, and up to 10 FPS on a single Intel Core i5 CPU. The deploy implementation is open-sourced and it can be found as a feature branch inside the autonomous driving framework Autoware. Code is available at: https://github.com/CPFL/Autoware/tree/feature/cnn_lidar_detection