 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComorbidity-Informed Transfer Learning for Neuro-developmental Disorder Diagnosis
Apr 13, 2025



Neuro-developmental disorders are manifested as dysfunctions in cognition, communication, behaviour and adaptability, and deep learning-based computer-aided diagnosis (CAD) can alleviate the increasingly strained healthcare resources on neuroimaging. However, neuroimaging such as fMRI contains complex spatio-temporal features, which makes the corresponding representations susceptible to a variety of distractions, thus leading to less effective in CAD. For the first time, we present a Comorbidity-Informed Transfer Learning(CITL) framework for diagnosing neuro-developmental disorders using fMRI. In CITL, a new reinforced representation generation network is proposed, which first combines transfer learning with pseudo-labelling to remove interfering patterns from the temporal domain of fMRI and generates new representations using encoder-decoder architecture. The new representations are then trained in an architecturally simple classification network to obtain CAD model. In particular, the framework fully considers the comorbidity mechanisms of neuro-developmental disorders and effectively integrates them with semi-supervised learning and transfer learning, providing new perspectives on interdisciplinary. Experimental results demonstrate that CITL achieves competitive accuracies of 76.32% and 73.15% for detecting autism spectrum disorder and attention deficit hyperactivity disorder, respectively, which outperforms existing related transfer learning work for 7.2% and 0.5% respectively.
A Confounding Factors-Inhibition Adversarial Learning Framework for Multi-site fMRI Mental Disorder Identification
Apr 12, 2025In open data sets of functional magnetic resonance imaging (fMRI), the heterogeneity of the data is typically attributed to a combination of factors, including differences in scanning procedures, the presence of confounding effects, and population diversities between multiple sites. These factors contribute to the diminished effectiveness of representation learning, which in turn affects the overall efficacy of subsequent classification procedures. To address these limitations, we propose a novel multi-site adversarial learning network (MSalNET) for fMRI-based mental disorder detection. Firstly, a representation learning module is introduced with a node information assembly (NIA) mechanism to better extract features from functional connectivity (FC). This mechanism aggregates edge information from both horizontal and vertical directions, effectively assembling node information. Secondly, to generalize the feature across sites, we proposed a site-level feature extraction module that can learn from individual FC data, which circumvents additional prior information. Lastly, an adversarial learning network is proposed as a means of balancing the trade-off between individual classification and site regression tasks, with the introduction of a novel loss function. The proposed method was evaluated on two multi-site fMRI datasets, i.e., Autism Brain Imaging Data Exchange (ABIDE) and ADHD-200. The results indicate that the proposed method achieves a better performance than other related algorithms with the accuracy of 75.56 and 68.92 in ABIDE and ADHD-200 datasets, respectively. Furthermore, the result of the site regression indicates that the proposed method reduces site variability from a data-driven perspective. The most discriminative brain regions revealed by NIA are consistent with statistical findings, uncovering the "black box" of deep learning to a certain extent.
Enhancing Nursing and Elderly Care with Large Language Models: An AI-Driven Framework
Dec 13, 2024



This paper explores the application of large language models (LLMs) in nursing and elderly care, focusing on AI-driven patient monitoring and interaction. We introduce a novel Chinese nursing dataset and implement incremental pre-training (IPT) and supervised fine-tuning (SFT) techniques to enhance LLM performance in specialized tasks. Using LangChain, we develop a dynamic nursing assistant capable of real-time care and personalized interventions. Experimental results demonstrate significant improvements, paving the way for AI-driven solutions to meet the growing demands of healthcare in aging populations.
Organization and Understanding of a Tactile Information Dataset TacAct During Physical Human-Robot Interactions
Aug 11, 2021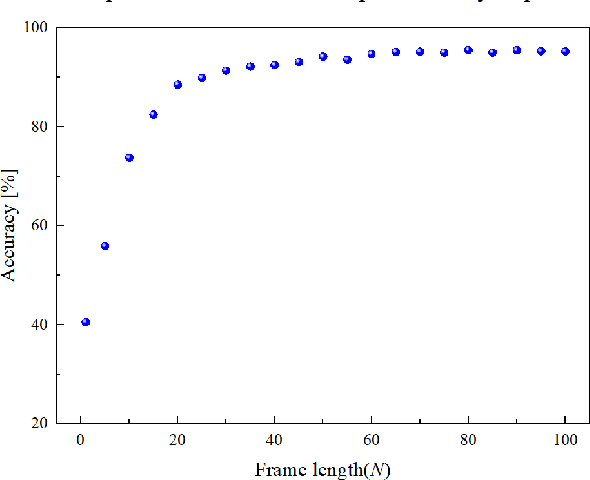

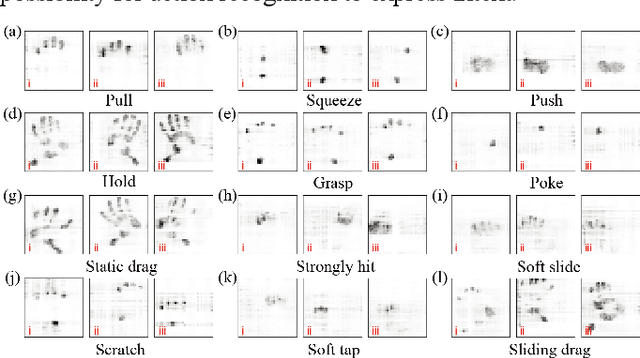

Advanced service robots require superior tactile intelligence to guarantee human-contact safety and to provide essential supplements to visual and auditory information for human-robot interaction, especially when a robot is in physical contact with a human. Tactile intelligence is an essential capability of perception and recognition from tactile information, based on the learning from a large amount of tactile data and the understanding of the physical meaning behind the data. This report introduces a recently collected and organized dataset "TacAct" that encloses real-time pressure distribution when a human subject touches the arms of a nursing-care robot. The dataset consists of information from 50 subjects who performed a total of 24,000 touch actions. Furthermore, the details of the dataset are described, the data are preliminarily analyzed, and the validity of the collected information is tested through a convolutional neural network LeNet-5 classifying different types of touch actions. We believe that the TacAct dataset would be more than beneficial for the community of human interactive robots to understand the tactile profile under various circumstances.