 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Euclidean Proximity: Repairing Latent World Models with Horizon-Matched Trajectory Reachability Metrics
May 21, 2026Latent world models can contain the state needed for control, yet their terminal-cost interface can expose the planner to the wrong decision-relevant information. In common latent MPC, candidate sequences are ranked by Euclidean distance between predicted terminal and goal latent states; this assumes that raw latent distance weights reachability-relevant variables correctly. We propose trajectory reachability metrics (TRM), a post-hoc terminal-ranking method for fixed latent world models. TRM trains a small pairwise head from logged trajectory structure and uses it as a replacement or hybrid cost; the encoder, dynamics, sampler, optimizer, and evaluation manifests remain fixed. The key design choice is horizon-aware supervision: the metric is trained on broad, balanced temporal separations to match the long-horizon terminal candidate ranking problem. On a hard TwoRoom benchmark, raw latent planning with LeWorldModel (LeWM) reaches 7.0% success, while full-horizon TRM reaches 97.0%; shuffled temporal-label controls stay at 0.0%. The same recipe improves a PLDM baseline from 32.7% to 84.0% across three seeds, and a short-horizon TRM variant reaches only 35.0% with the 100,000 pair budget. In TwoRoom, we provide mechanistic evidence for why TRM works: XY position is linearly decodable (R^2=0.998), yet raw latent MSE misranks candidates; the XY-probe rowspace accounts for less than 1% of terminal-goal latent MSE but carries most candidate-quality signal; and SCSA audits show that TRM improves the ordering and selected endpoint seen by the planner. On PushT go50/go75, TRM-style task-state metrics improve SCSA ranking and selected final distance more cleanly than closed-loop success, motivating auxiliary hybrid costs in continuous manipulation. TRM is the planner-facing repair, and audits explain when terminal reachability metrics should replace or augment raw latent proximity.
MAGIC: Multi-Step Advantage-Gated Causal Influence for Multi-agent Reinforcement Learning
May 03, 2026A key challenge in multi-agent reinforcement learning (MARL) lies in designing learning signals that effectively promote coordination among agents. Designing such signals necessitates the ability to quantify the true, long-term causal influence between agents. To address this, we introduce Multi-step Advantage-Gated Interventional Causal MARL (MAGIC), a framework that extracts multi-step causal influences between agents and selectively converts them into intrinsic rewards. MAGIC uses causal intervention with conditional mutual information to quantify long-horizon agent influence, and introduces an advantage-based gating mechanism to ensure exploration is directed toward beneficial, goal-aligned behaviors. Experiments across multiple standard MARL benchmarks and task families, including MPE and SMAC/SMACv2, demonstrate that MAGIC outperforms state-of-the-art methods by a significant margin, achieving an improvement of at least 10.1% in the main evaluation metric.
Shared Object Manipulation with a Team of Collaborative Quadrupeds
Oct 01, 2025
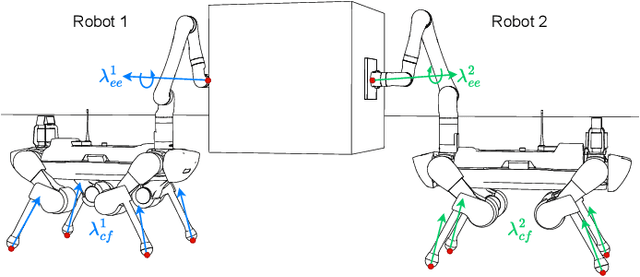
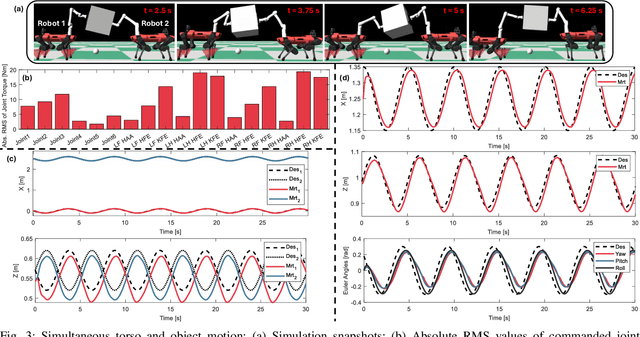
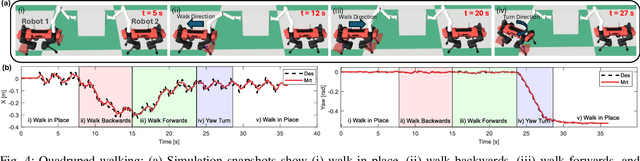
Utilizing teams of multiple robots is advantageous for handling bulky objects. Many related works focus on multi-manipulator systems, which are limited by workspace constraints. In this paper, we extend a classical hybrid motion-force controller to a team of legged manipulator systems, enabling collaborative loco-manipulation of rigid objects with a force-closed grasp. Our novel approach allows the robots to flexibly coordinate their movements, achieving efficient and stable object co-manipulation and transport, validated through extensive simulations and real-world experiments.
DP-GPT4MTS: Dual-Prompt Large Language Model for Textual-Numerical Time Series Forecasting
Aug 06, 2025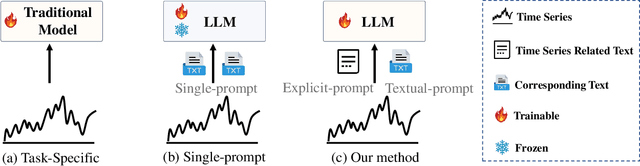

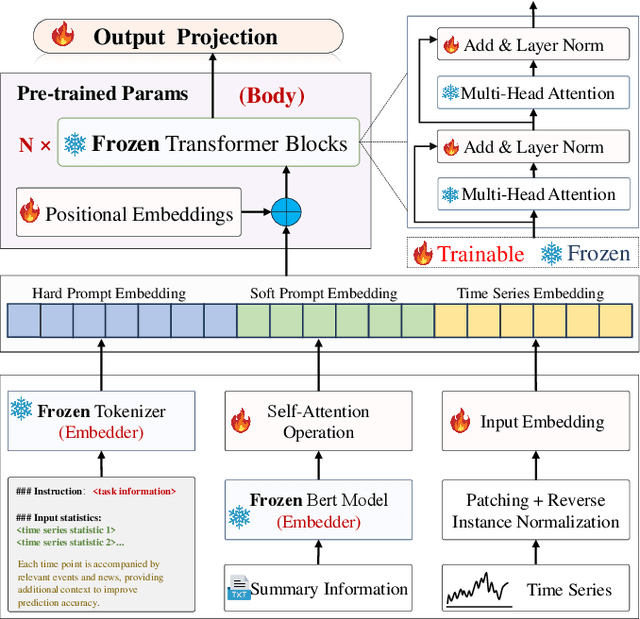

Time series forecasting is crucial in strategic planning and decision-making across various industries. Traditional forecasting models mainly concentrate on numerical time series data, often overlooking important textual information such as events and news, which can significantly affect forecasting accuracy. While large language models offer a promise for integrating multimodal data, existing single-prompt frameworks struggle to effectively capture the semantics of timestamped text, introducing redundant information that can hinder model performance. To address this limitation, we introduce DP-GPT4MTS (Dual-Prompt GPT2-base for Multimodal Time Series), a novel dual-prompt large language model framework that combines two complementary prompts: an explicit prompt for clear task instructions and a textual prompt for context-aware embeddings from time-stamped data. The tokenizer generates the explicit prompt while the embeddings from the textual prompt are refined through self-attention and feed-forward networks. Comprehensive experiments conducted on diverse textural-numerical time series datasets demonstrate that this approach outperforms state-of-the-art algorithms in time series forecasting. This highlights the significance of incorporating textual context via a dual-prompt mechanism to achieve more accurate time series predictions.
NoiseBoost: Alleviating Hallucination with Noise Perturbation for Multimodal Large Language Models
May 31, 2024
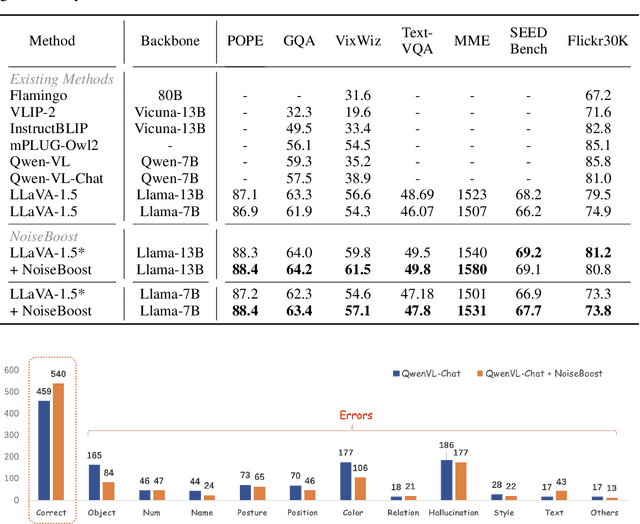


Multimodal large language models (MLLMs) contribute a powerful mechanism to understanding visual information building on large language models. However, MLLMs are notorious for suffering from hallucinations, especially when generating lengthy, detailed descriptions for images. Our analysis reveals that hallucinations stem from the inherent summarization mechanism of large language models, leading to excessive dependence on linguistic tokens while neglecting vision information. In this paper, we propose NoiseBoost, a broadly applicable and simple method for alleviating hallucinations for MLLMs through the integration of noise feature perturbations. Noise perturbation acts as a regularizer, facilitating a balanced distribution of attention weights among visual and linguistic tokens. Despite its simplicity, NoiseBoost consistently enhances the performance of MLLMs across common training strategies, including supervised fine-tuning and reinforcement learning. Further, NoiseBoost pioneerly enables semi-supervised learning for MLLMs, unleashing the power of unlabeled data. Comprehensive experiments demonstrate that NoiseBoost improves dense caption accuracy by 8.1% with human evaluation and achieves comparable results with 50% of the data by mining unlabeled data. Code and models are available at https://kaiwu5.github.io/noiseboost.
A Dual-mode Local Search Algorithm for Solving the Minimum Dominating Set Problem
Jul 25, 2023



Given a graph, the minimum dominating set (MinDS) problem is to identify a smallest set $D$ of vertices such that every vertex not in $D$ is adjacent to at least one vertex in $D$. The MinDS problem is a classic $\mathcal{NP}$-hard problem and has been extensively studied because of its many disparate applications in network analysis. To solve this problem efficiently, many heuristic approaches have been proposed to obtain a good solution within an acceptable time limit. However, existing MinDS heuristic algorithms are always limited by various tie-breaking cases when selecting vertices, which slows down the effectiveness of the algorithms. In this paper, we design an efficient local search algorithm for the MinDS problem, named DmDS -- a dual-mode local search framework that probabilistically chooses between two distinct vertex-swapping schemes. We further address limitations of other algorithms by introducing vertex selection criterion based on the frequency of vertices added to solutions to address tie-breaking cases, and a new strategy to improve the quality of the initial solution via a greedy-based strategy integrated with perturbation. We evaluate DmDS against the state-of-the-art algorithms on seven datasets, consisting of 346 instances (or families) with up to tens of millions of vertices. Experimental results show that DmDS obtains the best performance in accuracy for almost all instances and finds much better solutions than state-of-the-art MinDS algorithms on a broad range of large real-world graphs.
Towards Exact Interaction Force Control for Underactuated Quadrupedal Systems with Orthogonal Projection and Quadratic Programming
Oct 19, 2022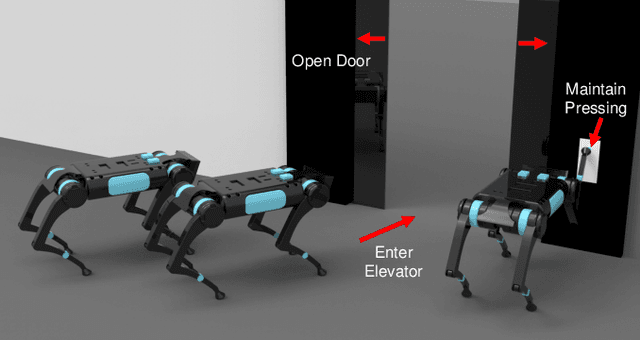
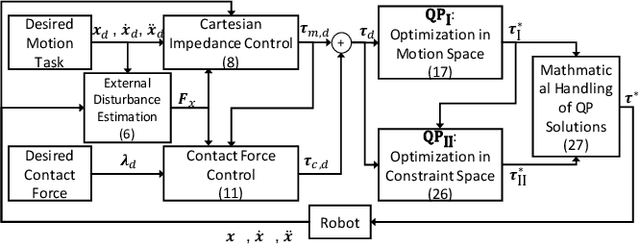
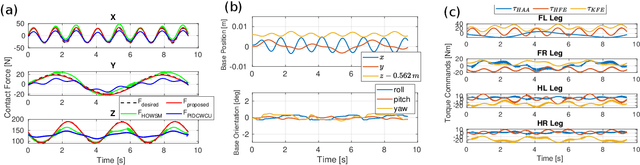
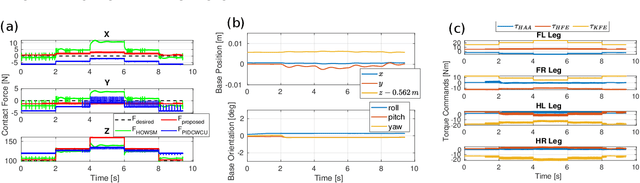
Projected Inverse Dynamics Control (PIDC) is commonly used in robots subject to contact, especially in quadrupedal systems. Many methods based on such dynamics have been developed for quadrupedal locomotion tasks, and only a few works studied simple interactions between the robot and environment, such as pressing an E-stop button. To facilitate the interaction requiring exact force control for safety, we propose a novel interaction force control scheme for underactuated quadrupedal systems relying on projection techniques and Quadratic Programming (QP). This algorithm allows the robot to apply a desired interaction force to the environment without using force sensors while satisfying physical constraints and inducing minimal base motion. Unlike previous projection-based methods, the QP design uses two selection matrices in its hierarchical structure, facilitating the decoupling between force and motion control. The proposed algorithm is verified with a quadrupedal robot in a high-fidelity simulator. Compared to the QP designs without the strategy of using two selection matrices and the PIDC method for contact force control, our method provided more accurate contact force tracking performance with minimal base movement, paving the way to approach the exact interaction force control for underactuated quadrupedal systems.
Towards Safe Landing of Falling Quadruped Robots Using a 3-DoF Morphable Inertial Tail
Sep 30, 2022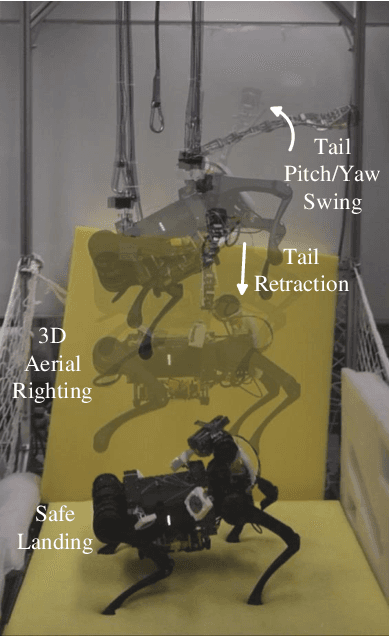
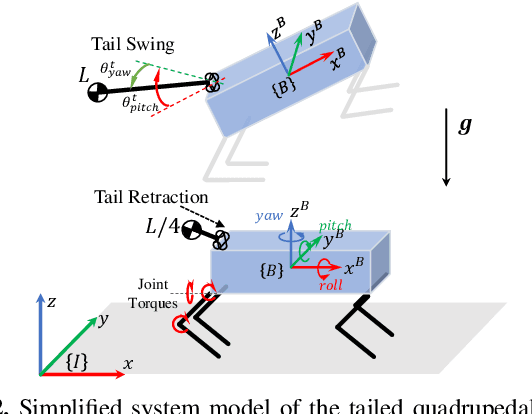
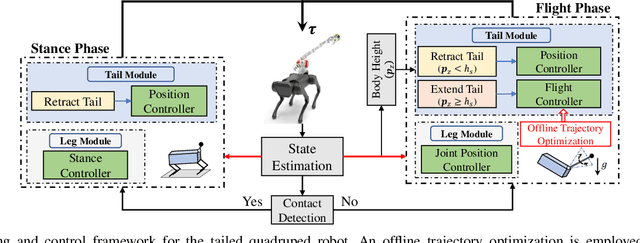
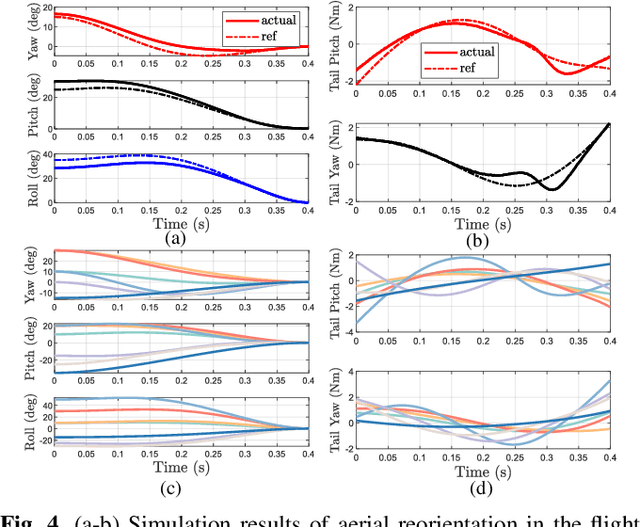
Falling cat problem is well-known where cats show their super aerial reorientation capability and can land safely. For their robotic counterparts, a similar falling quadruped robot problem, has not been fully addressed, although achieving safe landing as the cats has been increasingly investigated. Unlike imposing the burden on landing control, we approach to safe landing of falling quadruped robots by effective flight phase control. Different from existing work like swinging legs and attaching reaction wheels or simple tails, we propose to deploy a 3-DoF morphable inertial tail on a medium-size quadruped robot. In the flight phase, the tail with its maximum length can self-right the body orientation in 3D effectively; before touch-down, the tail length can be retracted to about 1/4 of its maximum for impressing the tail's side-effect on landing. To enable aerial reorientation for safe landing in the quadruped robots, we design a control architecture, which has been verified in a high-fidelity physics simulation environment with different initial conditions. Experimental results on a customized flight-phase test platform with comparable inertial properties are provided and show the tail's effectiveness on 3D body reorientation and its fast retractability before touch-down. An initial falling quadruped robot experiment is shown, where the robot Unitree A1 with the 3-DoF tail can land safely subject to non-negligible initial body angles.
Robot in the mirror: toward an embodied computational model of mirror self-recognition
Nov 09, 2020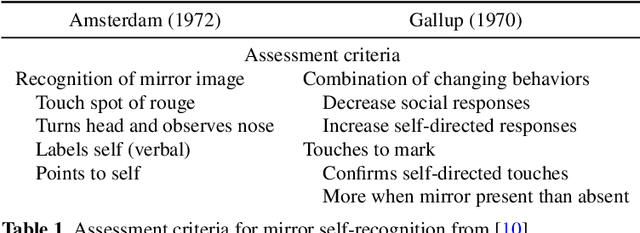
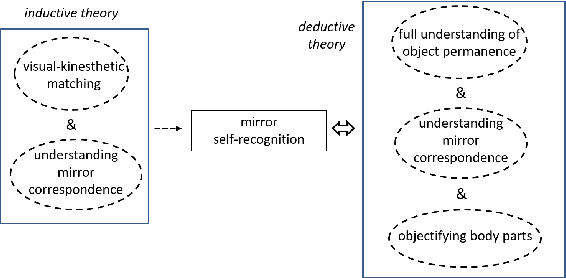
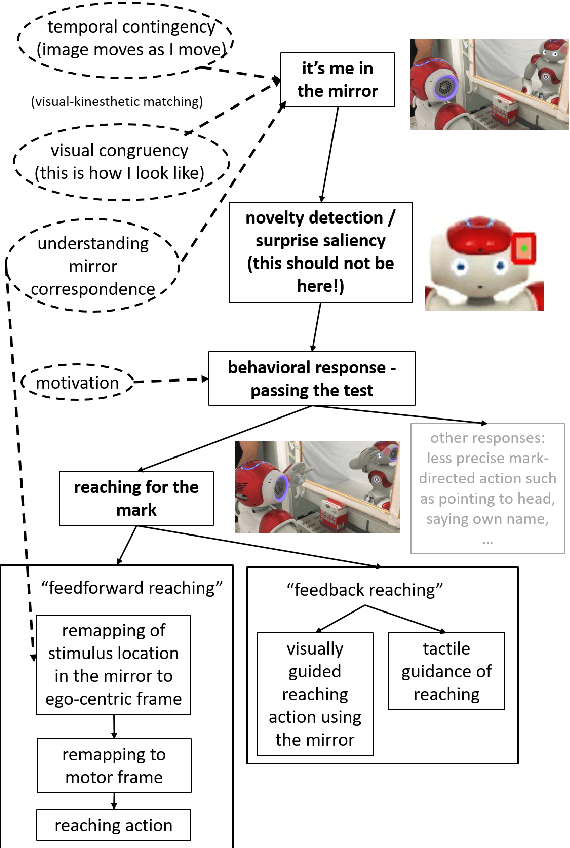
Self-recognition or self-awareness is a capacity attributed typically only to humans and few other species. The definitions of these concepts vary and little is known about the mechanisms behind them. However, there is a Turing test-like benchmark: the mirror self-recognition, which consists in covertly putting a mark on the face of the tested subject, placing her in front of a mirror, and observing the reactions. In this work, first, we provide a mechanistic decomposition, or process model, of what components are required to pass this test. Based on these, we provide suggestions for empirical research. In particular, in our view, the way the infants or animals reach for the mark should be studied in detail. Second, we develop a model to enable the humanoid robot Nao to pass the test. The core of our technical contribution is learning the appearance representation and visual novelty detection by means of learning the generative model of the face with deep auto-encoders and exploiting the prediction error. The mark is identified as a salient region on the face and reaching action is triggered, relying on a previously learned mapping to arm joint angles. The architecture is tested on two robots with a completely different face.