 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEverything-Grasping (EG) Gripper: A Universal Gripper with Synergistic Suction-Grasping Capabilities for Cross-Scale and Cross-State Manipulation
Oct 06, 2025Grasping objects across vastly different sizes and physical states-including both solids and liquids-with a single robotic gripper remains a fundamental challenge in soft robotics. We present the Everything-Grasping (EG) Gripper, a soft end-effector that synergistically integrates distributed surface suction with internal granular jamming, enabling cross-scale and cross-state manipulation without requiring airtight sealing at the contact interface with target objects. The EG Gripper can handle objects with surface areas ranging from sub-millimeter scale 0.2 mm2 (glass bead) to over 62,000 mm2 (A4 sized paper and woven bag), enabling manipulation of objects nearly 3,500X smaller and 88X larger than its own contact area (approximated at 707 mm2 for a 30 mm-diameter base). We further introduce a tactile sensing framework that combines liquid detection and pressure-based suction feedback, enabling real-time differentiation between solid and liquid targets. Guided by the actile-Inferred Grasping Mode Selection (TIGMS) algorithm, the gripper autonomously selects grasping modes based on distributed pressure and voltage signals. Experiments across diverse tasks-including underwater grasping, fragile object handling, and liquid capture-demonstrate robust and repeatable performance. To our knowledge, this is the first soft gripper to reliably grasp both solid and liquid objects across scales using a unified compliant architecture.
MBE-ARI: A Multimodal Dataset Mapping Bi-directional Engagement in Animal-Robot Interaction
Apr 11, 2025



Animal-robot interaction (ARI) remains an unexplored challenge in robotics, as robots struggle to interpret the complex, multimodal communication cues of animals, such as body language, movement, and vocalizations. Unlike human-robot interaction, which benefits from established datasets and frameworks, animal-robot interaction lacks the foundational resources needed to facilitate meaningful bidirectional communication. To bridge this gap, we present the MBE-ARI (Multimodal Bidirectional Engagement in Animal-Robot Interaction), a novel multimodal dataset that captures detailed interactions between a legged robot and cows. The dataset includes synchronized RGB-D streams from multiple viewpoints, annotated with body pose and activity labels across interaction phases, offering an unprecedented level of detail for ARI research. Additionally, we introduce a full-body pose estimation model tailored for quadruped animals, capable of tracking 39 keypoints with a mean average precision (mAP) of 92.7%, outperforming existing benchmarks in animal pose estimation. The MBE-ARI dataset and our pose estimation framework lay a robust foundation for advancing research in animal-robot interaction, providing essential tools for developing perception, reasoning, and interaction frameworks needed for effective collaboration between robots and animals. The dataset and resources are publicly available at https://github.com/RISELabPurdue/MBE-ARI/, inviting further exploration and development in this critical area.
Towards Safe Landing of Falling Quadruped Robots Using a 3-DoF Morphable Inertial Tail
Sep 30, 2022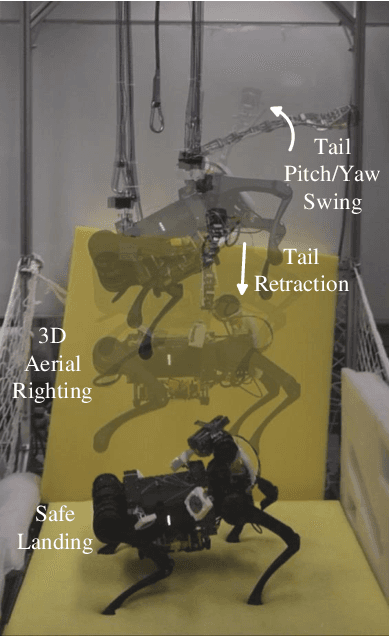
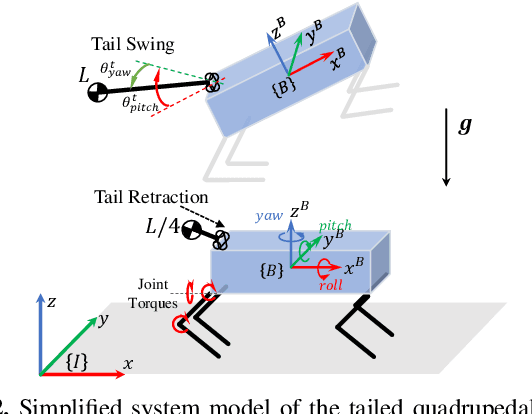
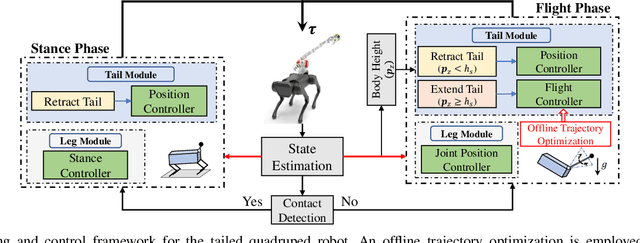
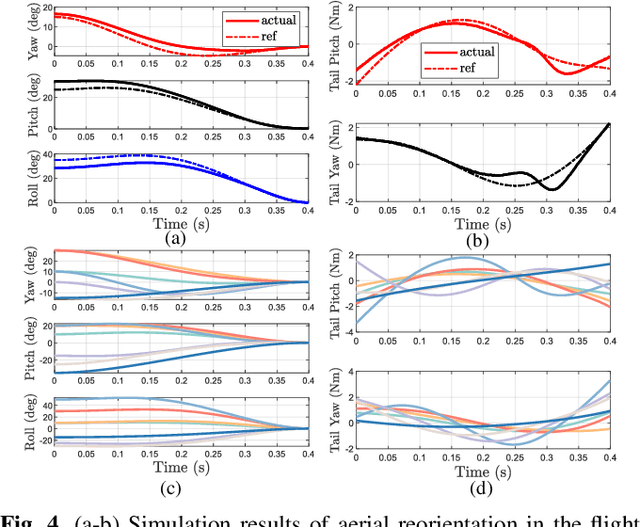
Falling cat problem is well-known where cats show their super aerial reorientation capability and can land safely. For their robotic counterparts, a similar falling quadruped robot problem, has not been fully addressed, although achieving safe landing as the cats has been increasingly investigated. Unlike imposing the burden on landing control, we approach to safe landing of falling quadruped robots by effective flight phase control. Different from existing work like swinging legs and attaching reaction wheels or simple tails, we propose to deploy a 3-DoF morphable inertial tail on a medium-size quadruped robot. In the flight phase, the tail with its maximum length can self-right the body orientation in 3D effectively; before touch-down, the tail length can be retracted to about 1/4 of its maximum for impressing the tail's side-effect on landing. To enable aerial reorientation for safe landing in the quadruped robots, we design a control architecture, which has been verified in a high-fidelity physics simulation environment with different initial conditions. Experimental results on a customized flight-phase test platform with comparable inertial properties are provided and show the tail's effectiveness on 3D body reorientation and its fast retractability before touch-down. An initial falling quadruped robot experiment is shown, where the robot Unitree A1 with the 3-DoF tail can land safely subject to non-negligible initial body angles.