 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot in the mirror: toward an embodied computational model of mirror self-recognition
Nov 09, 2020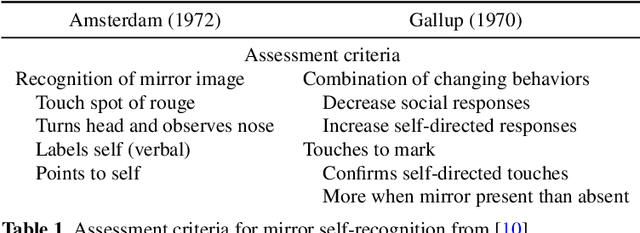
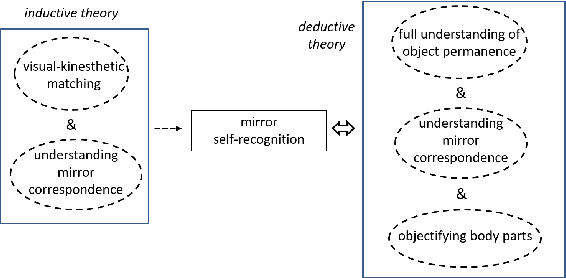
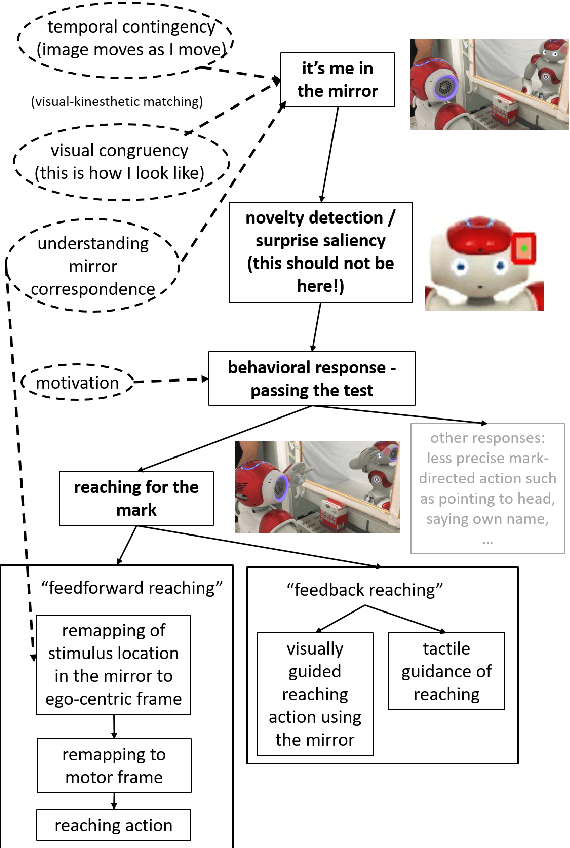
Self-recognition or self-awareness is a capacity attributed typically only to humans and few other species. The definitions of these concepts vary and little is known about the mechanisms behind them. However, there is a Turing test-like benchmark: the mirror self-recognition, which consists in covertly putting a mark on the face of the tested subject, placing her in front of a mirror, and observing the reactions. In this work, first, we provide a mechanistic decomposition, or process model, of what components are required to pass this test. Based on these, we provide suggestions for empirical research. In particular, in our view, the way the infants or animals reach for the mark should be studied in detail. Second, we develop a model to enable the humanoid robot Nao to pass the test. The core of our technical contribution is learning the appearance representation and visual novelty detection by means of learning the generative model of the face with deep auto-encoders and exploiting the prediction error. The mark is identified as a salient region on the face and reaching action is triggered, relying on a previously learned mapping to arm joint angles. The architecture is tested on two robots with a completely different face.