 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvoflux: Inference-Time Evolution of Executable Tool Workflows for Compact Agents
Jun 10, 2026Compact language models (LMs) reduce cost, latency, and deployment risk for tool agents. Yet MCP-style tool use requires more than isolated function calling: an agent must discover tools from live catalogs, satisfy schemas, preserve dependencies across intermediate outputs, and ground final responses in executed evidence. Small planners often generate plausible workflow graphs that fail under tool resolution, parameter validation, dependency tracking, or execution. We argue that this failure mode is poorly handled by small-corpus distillation. A few hundred teacher traces can teach workflow format, but rarely cover the recovery behavior needed to repair failed plans over changing tool catalogs. We introduce Evoflux, an inference-time evolutionary search method that treats compact tool use as the repair of executable tool workflows. It evolves typed workflow graphs through structured edits, execution feedback, adaptive intensity, meta-guided redesign, and diversity pruning. On held-out MCP-Bench tasks spanning live MCP servers and 250 tools, Evoflux raises execution feasibility from roughly 3% to 17-24% across small planners. In contrast, SFT and SFT+DPO on the same search-mined data match, underperform, or collapse below zero-shot performance; ReAct reaches higher peaks, but with higher variance and token cost. These results show that execution-grounded search is more reliable under scarce teacher-trace budgets.
A Multi-AI-agent Framework Enabling End-to-end Finite Element Analysis for Solid Mechanics Problems
May 28, 2026Finite element analysis (FEA) is the most important numerical approach for solid mechanics. Challenges of FEA include a steep learning curve for entry-level users and potential false simulations due to incorrect definitions of key simulation components, such as boundary conditions, load cases, and solution variables. Years of engineering experience are usually necessary for real-world problem-solving. To address these issues, we present AbaqusAgent, a multi-agent framework grounded in large language models (LLMs) for solid mechanics analyses. AbaqusAgent is developed to facilitate analysis case generation and execution using Abaqus, one of the most widely used FEA packages, by turning users' natural-language instructions into executed FEA analyses and result visualization. AbaqusAgent is composed of six agents, including interpreter, architect, input writer, runner, reviewer, and visualizer agents, encompassing all the essential pre-processing and post-processing steps of standard FEA analyses. A wide variety of 50 solid mechanics problems have been successfully validated, achieving an overall success rate of 86%. Beyond improving the efficiency of FEA for solid mechanics problems and lowering the barrier to computational mechanics education, AbaqusAgent advances the human-simulation interaction paradigm and enables integration with AI-empowered optimization and material characterization workflows. The code is available at https://github.com/LIRAM-LIN/AbaqusAgent
SCICONVBENCH: Benchmarking LLMs on Multi-Turn Clarification for Task Formulation in Computational Science
May 18, 2026Large Language Models (LLMs) are increasingly deployed as scientific AI as- sistants, and a growing body of benchmarks evaluates their capabilities across knowledge retrieval, reasoning, code generation, and tool use. These evaluations, however, typically assume the scientific problem is already well-posed, whereas practical scientific assistance often begins with an ill-posed user request that must be refined through dialogue before any computation, analysis, or experiment can be carried out reliably. We introduce SCICONVBENCH, a benchmark for multi- turn clarification in scientific task formulation across four computational science problem domains: fluid mechanics, solid mechanics, materials science, and par- tial differential equations (PDEs). SCICONVBENCH targets two complementary capabilities: eliciting missing information (disambiguation) and detecting and correcting erroneous requests containing internally contradictory information (in- consistency resolution). Our benchmark pairs a structured task ontology with a rubric-based evaluation framework, enabling systematic measurement of LLM per- formance across three dimensions: clarification behavior, conversational grounding, and final-specification fidelity. Current frontier models perform relatively well on inconsistency resolution, but even the best model resolves only 52.7% of the disambiguation cases in fluid mechanics. We further find that frontier LLMs fre- quently make silent assumptions and perform implicit specification repairs that are not grounded in the conversation with users. SCICONVBENCH establishes a foundation for evaluating the upstream conversational reasoning that a reliable computational science assistant requires. The code and data can be found at https://github.com/csml-rpi/SciConvBench.
AI CFD Scientist: Toward Open-Ended Computational Fluid Dynamics Discovery with Physics-Aware AI Agents
May 07, 2026Recent LLM-based agents have closed substantial portions of the scientific discovery loop in software-only machine-learning research, in chemistry, and in biology. Extending the same loop to high-fidelity physical simulators is harder, because solver completion does not imply physical validity and many failure modes appear only in field-level imagery rather than in solver logs. We present AI CFD Scientist, an open-source AI scientist for computational fluid dynamics (CFD) that, to our knowledge, is the first to span literature-grounded ideation, validated execution, vision-based physics verification, source-code modification, and figure-grounded writing within a single inspectable workflow. Three coupled pathways cover parameter sweeps within a fixed solver, case-local C++ library compilation for new physical models, and open-ended hypothesis search against a reference comparator, all running on OpenFOAM through Foam-Agent. At the center of the framework is a vision-language physics-verification gate that inspects rendered flow fields before any result is accepted, rerun, or written into a manuscript. On five tasks under a shared GPT-5.5 backbone, AI CFD Scientist autonomously discovers a Spalart-Allmaras runtime correction that reduces lower-wall Cf RMSE against DNS by 7.89% on the periodic hill at Reh=5600; under matched LLM cost, two strong general AI-scientist baselines (ARIS, DeepScientist) execute partial CFD workflows but lack the domain-specific validity gates needed to convert runs into defensible scientific claims; and a controlled planted-failure ablation shows that the vision-language gate detects 14 of 16 silent failures missed by solver-level checks. Code, prompts, and run artifacts are released at https://github.com/csml-rpi/cfd-scientist.
FactReview: Evidence-Grounded Reviews with Literature Positioning and Execution-Based Claim Verification
Apr 07, 2026Peer review in machine learning is under growing pressure from rising submission volume and limited reviewer time. Most LLM-based reviewing systems read only the manuscript and generate comments from the paper's own narrative. This makes their outputs sensitive to presentation quality and leaves them weak when the evidence needed for review lies in related work or released code. We present FactReview, an evidence-grounded reviewing system that combines claim extraction, literature positioning, and execution-based claim verification. Given a submission, FactReview identifies major claims and reported results, retrieves nearby work to clarify the paper's technical position, and, when code is available, executes the released repository under bounded budgets to test central empirical claims. It then produces a concise review and an evidence report that assigns each major claim one of five labels: Supported, Supported by the paper, Partially supported, In conflict, or Inconclusive. In a case study on CompGCN, FactReview reproduces results that closely match those reported for link prediction and node classification, yet also shows that the paper's broader performance claim across tasks is not fully sustained: on MUTAG graph classification, the reproduced result is 88.4%, whereas the strongest baseline reported in the paper remains 92.6%. The claim is therefore only partially supported. More broadly, this case suggests that AI is most useful in peer review not as a final decision-maker, but as a tool for gathering evidence and helping reviewers produce more evidence-grounded assessments. The code is public at https://github.com/DEFENSE-SEU/Review-Assistant.
From Static Templates to Dynamic Runtime Graphs: A Survey of Workflow Optimization for LLM Agents
Mar 23, 2026Large language model (LLM)-based systems are becoming increasingly popular for solving tasks by constructing executable workflows that interleave LLM calls, information retrieval, tool use, code execution, memory updates, and verification. This survey reviews recent methods for designing and optimizing such workflows, which we treat as agentic computation graphs (ACGs). We organize the literature based on when workflow structure is determined, where structure refers to which components or agents are present, how they depend on each other, and how information flows between them. This lens distinguishes static methods, which fix a reusable workflow scaffold before deployment, from dynamic methods, which select, generate, or revise the workflow for a particular run before or during execution. We further organize prior work along three dimensions: when structure is determined, what part of the workflow is optimized, and which evaluation signals guide optimization (e.g., task metrics, verifier signals, preferences, or trace-derived feedback). We also distinguish reusable workflow templates, run-specific realized graphs, and execution traces, separating reusable design choices from the structures actually deployed in a given run and from realized runtime behavior. Finally, we outline a structure-aware evaluation perspective that complements downstream task metrics with graph-level properties, execution cost, robustness, and structural variation across inputs. Our goal is to provide a clear vocabulary, a unified framework for positioning new methods, a more comparable view of existing body of literature, and a more reproducible evaluation standard for future work in workflow optimizations for LLM agents.
Foam-Agent: Towards Automated Intelligent CFD Workflows
May 08, 2025Computational Fluid Dynamics (CFD) is an essential simulation tool in various engineering disciplines, but it often requires substantial domain expertise and manual configuration, creating barriers to entry. We present Foam-Agent, a multi-agent framework that automates complex OpenFOAM-based CFD simulation workflows from natural language inputs. Our innovation includes (1) a hierarchical multi-index retrieval system with specialized indices for different simulation aspects, (2) a dependency-aware file generation system that provides consistency management across configuration files, and (3) an iterative error correction mechanism that diagnoses and resolves simulation failures without human intervention. Through comprehensive evaluation on the dataset of 110 simulation tasks, Foam-Agent achieves an 83.6% success rate with Claude 3.5 Sonnet, significantly outperforming existing frameworks (55.5% for MetaOpenFOAM and 37.3% for OpenFOAM-GPT). Ablation studies demonstrate the critical contribution of each system component, with the specialized error correction mechanism providing a 36.4% performance improvement. Foam-Agent substantially lowers the CFD expertise threshold while maintaining modeling accuracy, demonstrating the potential of specialized multi-agent systems to democratize access to complex scientific simulation tools. The code is public at https://github.com/csml-rpi/Foam-Agent
Deep Autoencoder with SVD-Like Convergence and Flat Minima
Oct 23, 2024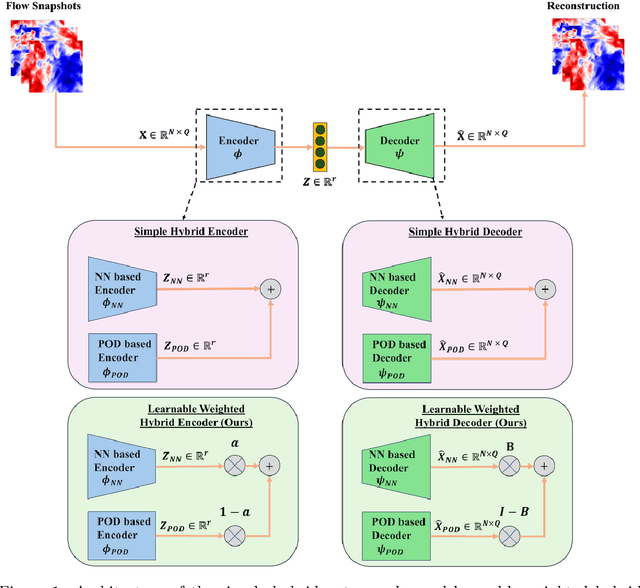

Representation learning for high-dimensional, complex physical systems aims to identify a low-dimensional intrinsic latent space, which is crucial for reduced-order modeling and modal analysis. To overcome the well-known Kolmogorov barrier, deep autoencoders (AEs) have been introduced in recent years, but they often suffer from poor convergence behavior as the rank of the latent space increases. To address this issue, we propose the learnable weighted hybrid autoencoder, a hybrid approach that combines the strengths of singular value decomposition (SVD) with deep autoencoders through a learnable weighted framework. We find that the introduction of learnable weighting parameters is essential - without them, the resulting model would either collapse into a standard POD or fail to exhibit the desired convergence behavior. Additionally, we empirically find that our trained model has a sharpness thousands of times smaller compared to other models. Our experiments on classical chaotic PDE systems, including the 1D Kuramoto-Sivashinsky and forced isotropic turbulence datasets, demonstrate that our approach significantly improves generalization performance compared to several competing methods, paving the way for robust representation learning of high-dimensional, complex physical systems.
Learning Noise-Robust Stable Koopman Operator for Control with Physics-Informed Observables
Aug 13, 2024We propose a novel learning framework for Koopman operator of nonlinear dynamical systems that is informed by the governing equation and guarantees long-time stability and robustness to noise. In contrast to existing frameworks where either ad-hoc observables or blackbox neural networks are used to construct observables in the extended dynamic mode decomposition (EDMD), our observables are informed by governing equations via Polyflow. To improve the noise robustness and guarantee long-term stability, we designed a stable parameterization of the Koopman operator together with a progressive learning strategy for roll-out recurrent loss. To further improve model performance in the phase space, a simple iterative strategy of data augmentation was developed. Numerical experiments of prediction and control of classic nonlinear systems with ablation study showed the effectiveness of the proposed techniques over several state-of-the-art practices.
Grad-Shafranov equilibria via data-free physics informed neural networks
Nov 22, 2023


A large number of magnetohydrodynamic (MHD) equilibrium calculations are often required for uncertainty quantification, optimization, and real-time diagnostic information, making MHD equilibrium codes vital to the field of plasma physics. In this paper, we explore a method for solving the Grad-Shafranov equation by using Physics-Informed Neural Networks (PINNs). For PINNs, we optimize neural networks by directly minimizing the residual of the PDE as a loss function. We show that PINNs can accurately and effectively solve the Grad-Shafranov equation with several different boundary conditions. We also explore the parameter space by varying the size of the model, the learning rate, and boundary conditions to map various trade-offs such as between reconstruction error and computational speed. Additionally, we introduce a parameterized PINN framework, expanding the input space to include variables such as pressure, aspect ratio, elongation, and triangularity in order to handle a broader range of plasma scenarios within a single network. Parametrized PINNs could be used in future work to solve inverse problems such as shape optimization.