 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Human Trust in LLM-Based Planners: A Preliminary Study
Feb 27, 2025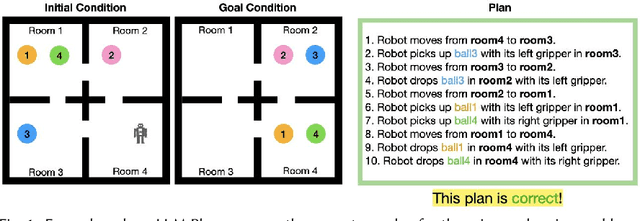

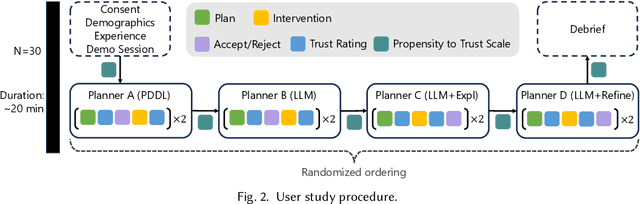
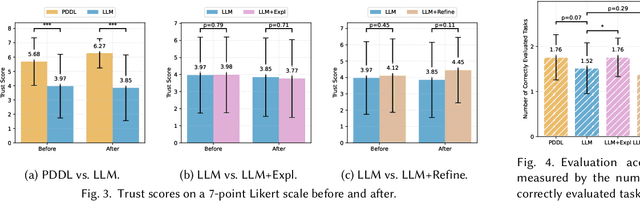
Large Language Models (LLMs) are increasingly used for planning tasks, offering unique capabilities not found in classical planners such as generating explanations and iterative refinement. However, trust--a critical factor in the adoption of planning systems--remains underexplored in the context of LLM-based planning tasks. This study bridges this gap by comparing human trust in LLM-based planners with classical planners through a user study in a Planning Domain Definition Language (PDDL) domain. Combining subjective measures, such as trust questionnaires, with objective metrics like evaluation accuracy, our findings reveal that correctness is the primary driver of trust and performance. Explanations provided by the LLM improved evaluation accuracy but had limited impact on trust, while plan refinement showed potential for increasing trust without significantly enhancing evaluation accuracy.
Thing2Reality: Transforming 2D Content into Conditioned Multiviews and 3D Gaussian Objects for XR Communication
Oct 09, 2024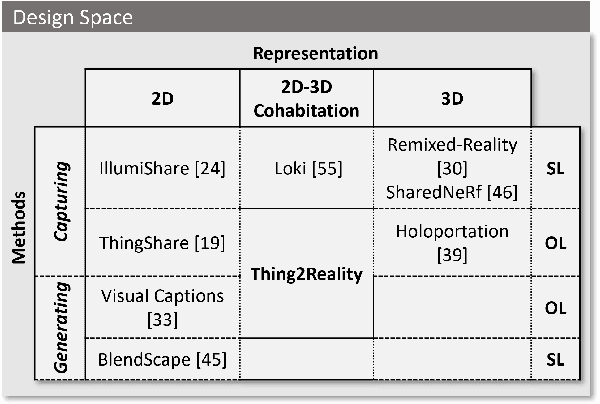
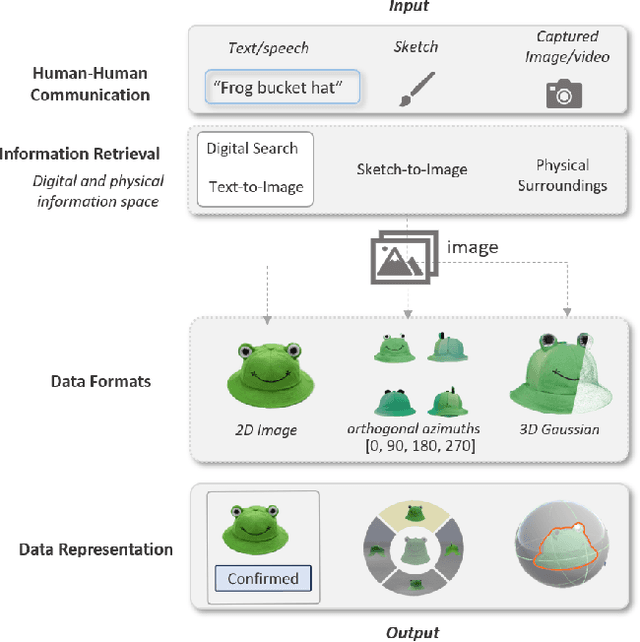
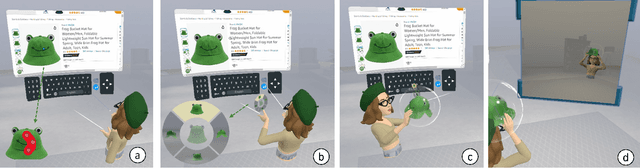
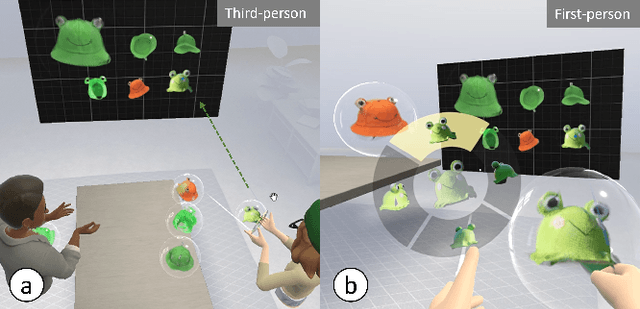
During remote communication, participants often share both digital and physical content, such as product designs, digital assets, and environments, to enhance mutual understanding. Recent advances in augmented communication have facilitated users to swiftly create and share digital 2D copies of physical objects from video feeds into a shared space. However, conventional 2D representations of digital objects restricts users' ability to spatially reference items in a shared immersive environment. To address this, we propose Thing2Reality, an Extended Reality (XR) communication platform that enhances spontaneous discussions of both digital and physical items during remote sessions. With Thing2Reality, users can quickly materialize ideas or physical objects in immersive environments and share them as conditioned multiview renderings or 3D Gaussians. Thing2Reality enables users to interact with remote objects or discuss concepts in a collaborative manner. Our user study revealed that the ability to interact with and manipulate 3D representations of objects significantly enhances the efficiency of discussions, with the potential to augment discussion of 2D artifacts.
DeepTake: Prediction of Driver Takeover Behavior using Multimodal Data
Jan 15, 2021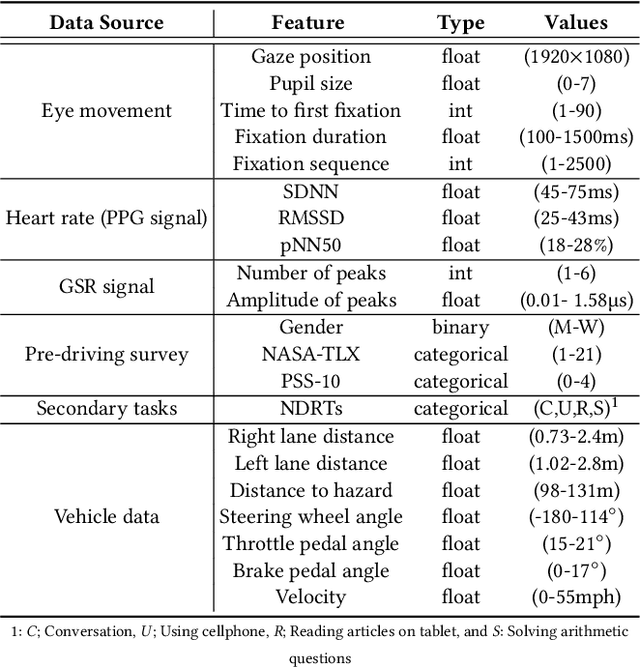
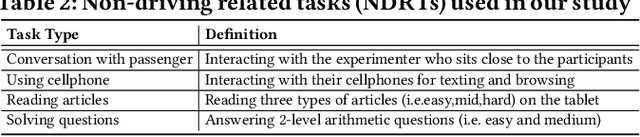
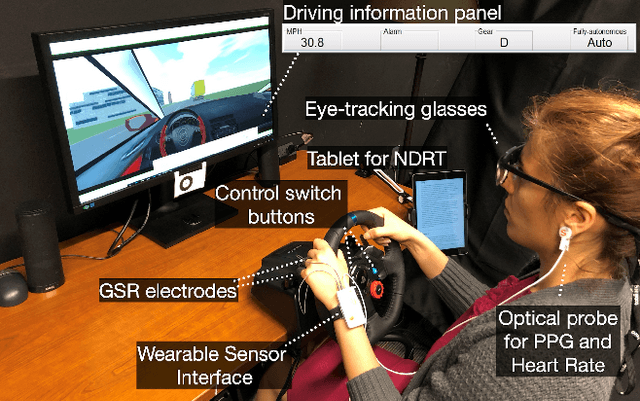
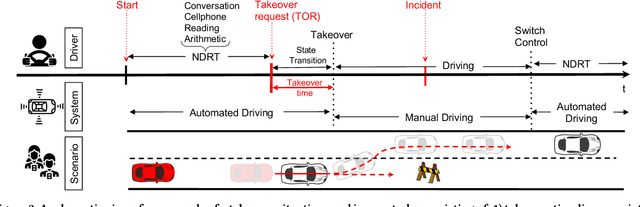
Automated vehicles promise a future where drivers can engage in non-driving tasks without hands on the steering wheels for a prolonged period. Nevertheless, automated vehicles may still need to occasionally hand the control back to drivers due to technology limitations and legal requirements. While some systems determine the need for driver takeover using driver context and road condition to initiate a takeover request, studies show that the driver may not react to it. We present DeepTake, a novel deep neural network-based framework that predicts multiple aspects of takeover behavior to ensure that the driver is able to safely take over the control when engaged in non-driving tasks. Using features from vehicle data, driver biometrics, and subjective measurements, DeepTake predicts the driver's intention, time, and quality of takeover. We evaluate DeepTake performance using multiple evaluation metrics. Results show that DeepTake reliably predicts the takeover intention, time, and quality, with an accuracy of 96%, 93%, and 83%, respectively. Results also indicate that DeepTake outperforms previous state-of-the-art methods on predicting driver takeover time and quality. Our findings have implications for the algorithm development of driver monitoring and state detection.