 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMADR: MPC-guided Adversarial DeepReach
Oct 21, 2025Hamilton-Jacobi (HJ) Reachability offers a framework for generating safe value functions and policies in the face of adversarial disturbance, but is limited by the curse of dimensionality. Physics-informed deep learning is able to overcome this infeasibility, but itself suffers from slow and inaccurate convergence, primarily due to weak PDE gradients and the complexity of self-supervised learning. A few works, recently, have demonstrated that enriching the self-supervision process with regular supervision (based on the nature of the optimal control problem), greatly accelerates convergence and solution quality, however, these have been limited to single player problems and simple games. In this work, we introduce MADR: MPC-guided Adversarial DeepReach, a general framework to robustly approximate the two-player, zero-sum differential game value function. In doing so, MADR yields the corresponding optimal strategies for both players in zero-sum games as well as safe policies for worst-case robustness. We test MADR on a multitude of high-dimensional simulated and real robotic agents with varying dynamics and games, finding that our approach significantly out-performs state-of-the-art baselines in simulation and produces impressive results in hardware.
Reachability Barrier Networks: Learning Hamilton-Jacobi Solutions for Smooth and Flexible Control Barrier Functions
May 16, 2025Recent developments in autonomous driving and robotics underscore the necessity of safety-critical controllers. Control barrier functions (CBFs) are a popular method for appending safety guarantees to a general control framework, but they are notoriously difficult to generate beyond low dimensions. Existing methods often yield non-differentiable or inaccurate approximations that lack integrity, and thus fail to ensure safety. In this work, we use physics-informed neural networks (PINNs) to generate smooth approximations of CBFs by computing Hamilton-Jacobi (HJ) optimal control solutions. These reachability barrier networks (RBNs) avoid traditional dimensionality constraints and support the tuning of their conservativeness post-training through a parameterized discount term. To ensure robustness of the discounted solutions, we leverage conformal prediction methods to derive probabilistic safety guarantees for RBNs. We demonstrate that RBNs are highly accurate in low dimensions, and safer than the standard neural CBF approach in high dimensions. Namely, we showcase the RBNs in a 9D multi-vehicle collision avoidance problem where it empirically proves to be 5.5x safer and 1.9x less conservative than the neural CBFs, offering a promising method to synthesize CBFs for general nonlinear autonomous systems.
Back to Base: Towards Hands-Off Learning via Safe Resets with Reach-Avoid Safety Filters
Jan 05, 2025Designing controllers that accomplish tasks while guaranteeing safety constraints remains a significant challenge. We often want an agent to perform well in a nominal task, such as environment exploration, while ensuring it can avoid unsafe states and return to a desired target by a specific time. In particular we are motivated by the setting of safe, efficient, hands-off training for reinforcement learning in the real world. By enabling a robot to safely and autonomously reset to a desired region (e.g., charging stations) without human intervention, we can enhance efficiency and facilitate training. Safety filters, such as those based on control barrier functions, decouple safety from nominal control objectives and rigorously guarantee safety. Despite their success, constructing these functions for general nonlinear systems with control constraints and system uncertainties remains an open problem. This paper introduces a safety filter obtained from the value function associated with the reach-avoid problem. The proposed safety filter minimally modifies the nominal controller while avoiding unsafe regions and guiding the system back to the desired target set. By preserving policy performance while allowing safe resetting, we enable efficient hands-off reinforcement learning and advance the feasibility of safe training for real world robots. We demonstrate our approach using a modified version of soft actor-critic to safely train a swing-up task on a modified cartpole stabilization problem.
Categorical Traffic Transformer: Interpretable and Diverse Behavior Prediction with Tokenized Latent
Nov 30, 2023Adept traffic models are critical to both planning and closed-loop simulation for autonomous vehicles (AV), and key design objectives include accuracy, diverse multimodal behaviors, interpretability, and downstream compatibility. Recently, with the advent of large language models (LLMs), an additional desirable feature for traffic models is LLM compatibility. We present Categorical Traffic Transformer (CTT), a traffic model that outputs both continuous trajectory predictions and tokenized categorical predictions (lane modes, homotopies, etc.). The most outstanding feature of CTT is its fully interpretable latent space, which enables direct supervision of the latent variable from the ground truth during training and avoids mode collapse completely. As a result, CTT can generate diverse behaviors conditioned on different latent modes with semantic meanings while beating SOTA on prediction accuracy. In addition, CTT's ability to input and output tokens enables integration with LLMs for common-sense reasoning and zero-shot generalization.
Patching Neural Barrier Functions Using Hamilton-Jacobi Reachability
Apr 19, 2023



Learning-based control algorithms have led to major advances in robotics at the cost of decreased safety guarantees. Recently, neural networks have also been used to characterize safety through the use of barrier functions for complex nonlinear systems. Learned barrier functions approximately encode and enforce a desired safety constraint through a value function, but do not provide any formal guarantees. In this paper, we propose a local dynamic programming (DP) based approach to "patch" an almost-safe learned barrier at potentially unsafe points in the state space. This algorithm, HJ-Patch, obtains a novel barrier that provides formal safety guarantees, yet retains the global structure of the learned barrier. Our local DP based reachability algorithm, HJ-Patch, updates the barrier function "minimally" at points that both (a) neighbor the barrier safety boundary and (b) do not satisfy the safety condition. We view this as a key step to bridging the gap between learning-based barrier functions and Hamilton-Jacobi reachability analysis, providing a framework for further integration of these approaches. We demonstrate that for well-trained barriers we reduce the computational load by 2 orders of magnitude with respect to standard DP-based reachability, and demonstrate scalability to a 6-dimensional system, which is at the limit of standard DP-based reachability.
Refining Control Barrier Functions through Hamilton-Jacobi Reachability
Apr 26, 2022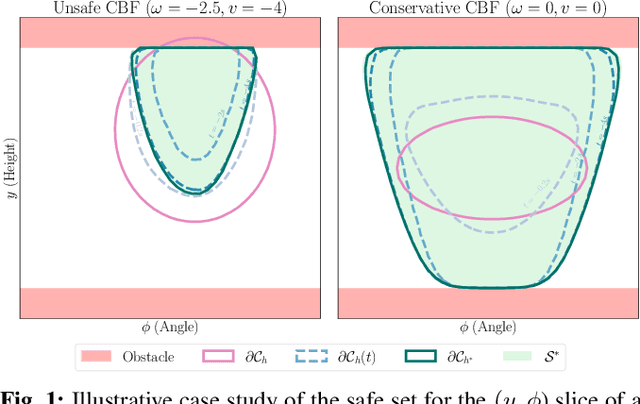
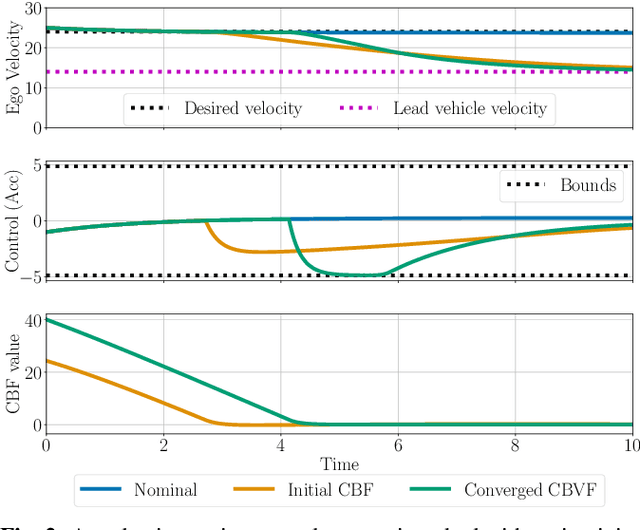
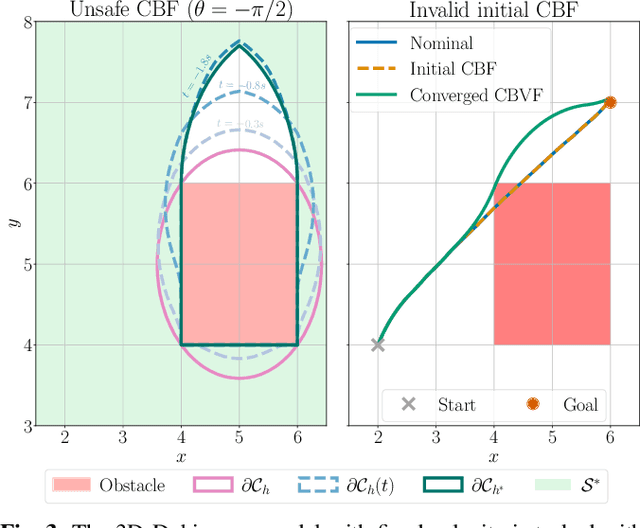
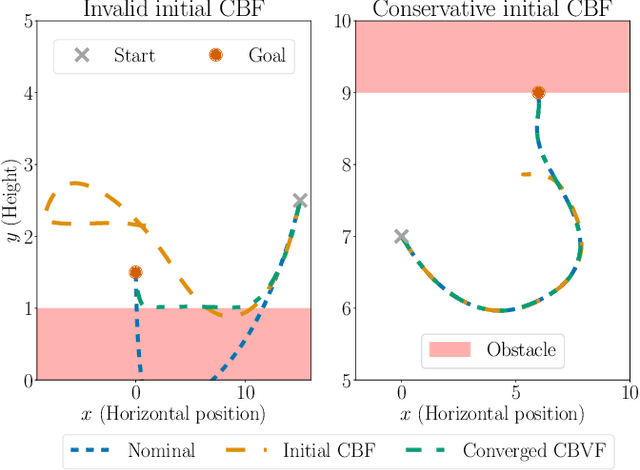
Safety filters based on Control Barrier Functions (CBFs) have emerged as a practical tool for the safety-critical control of autonomous systems. These approaches encode safety through a value function and enforce safety by imposing a constraint on the time derivative of this value function. However, synthesizing a valid CBF that is not overly conservative in the presence of input constraints is a notorious challenge. In this work, we propose refining candidate CBFs using formal verification methods to obtain a valid CBF. In particular, we update an expert-synthesized or backup CBF using dynamic programming (DP) based reachability analysis. Our framework guarantees that with every DP iteration the obtained CBF is provably at least as safe as the prior iteration and converges to a valid CBF. Therefore, our proposed method can be used in-the-loop for robotic systems. We demonstrate the practicality of our method to enhance safety and/or reduce conservativeness on a range of nonlinear control-affine systems using various CBF synthesis techniques in simulation.
Soft Robot Optimal Control Via Reduced Order Finite Element Models
Nov 04, 2020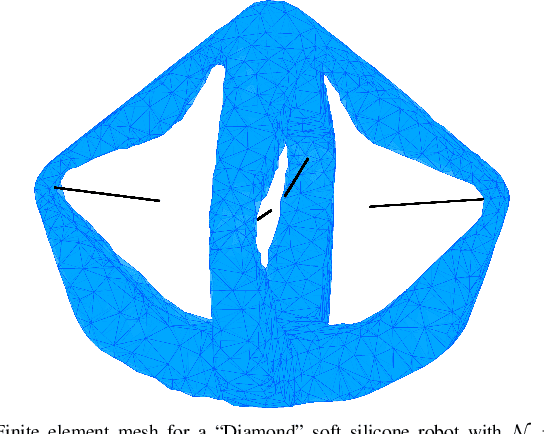
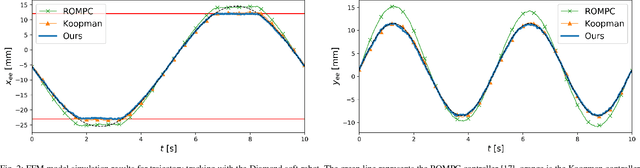
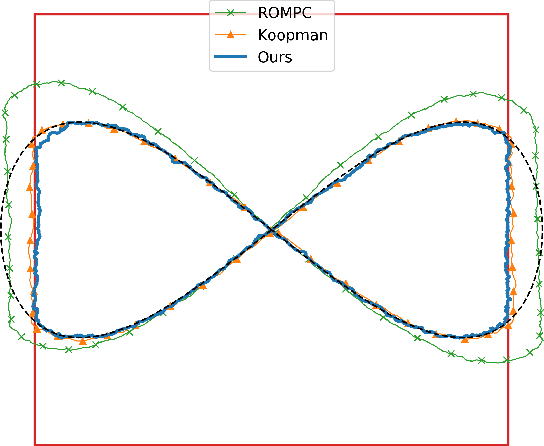
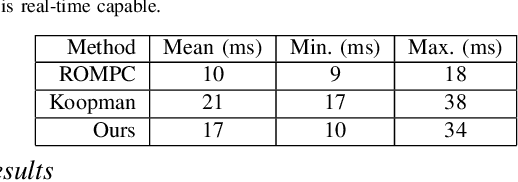
Finite element methods have been successfully used to develop physics-based models of soft robots that capture the nonlinear dynamic behavior induced by continuous deformation. These high-fidelity models are therefore ideal for designing controllers for complex dynamic tasks such as trajectory optimization and trajectory tracking. However, finite element models are also typically very high-dimensional, which makes real-time control challenging. In this work we propose an approach for finite element model-based control of soft robots that leverages model order reduction techniques to significantly increase computational efficiency. In particular, a constrained optimal control problem is formulated based on a nonlinear reduced order finite element model and is solved via sequential convex programming. This approach is demonstrated through simulation of a cable-driven soft robot for a constrained trajectory tracking task, where a 9768-dimensional finite element model is used for controller design.