 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-based learning in Text-RAG and Image-RAG
Jan 13, 2026This research analyzed and compared the multi-modal approach in the Vision Transformer(EVA-ViT) based image encoder with the LlaMA or ChatGPT LLM to reduce the hallucination problem and detect diseases in chest x-ray images. In this research, we utilized the NIH Chest X-ray image to train the model and compared it in image-based RAG, text-based RAG, and baseline. [3] [5] In a result, the text-based RAG[2] e!ectively reduces the hallucination problem by using external knowledge information, and the image-based RAG improved the prediction con"dence and calibration by using the KNN methods. [4] Moreover, the GPT LLM showed better performance, a low hallucination rate, and better Expected Calibration Error(ECE) than Llama Llama-based model. This research shows the challenge of data imbalance, a complex multi-stage structure, but suggests a large experience environment and a balanced example of use.
X-Capture: An Open-Source Portable Device for Multi-Sensory Learning
Apr 03, 2025



Understanding objects through multiple sensory modalities is fundamental to human perception, enabling cross-sensory integration and richer comprehension. For AI and robotic systems to replicate this ability, access to diverse, high-quality multi-sensory data is critical. Existing datasets are often limited by their focus on controlled environments, simulated objects, or restricted modality pairings. We introduce X-Capture, an open-source, portable, and cost-effective device for real-world multi-sensory data collection, capable of capturing correlated RGBD images, tactile readings, and impact audio. With a build cost under $1,000, X-Capture democratizes the creation of multi-sensory datasets, requiring only consumer-grade tools for assembly. Using X-Capture, we curate a sample dataset of 3,000 total points on 500 everyday objects from diverse, real-world environments, offering both richness and variety. Our experiments demonstrate the value of both the quantity and the sensory breadth of our data for both pretraining and fine-tuning multi-modal representations for object-centric tasks such as cross-sensory retrieval and reconstruction. X-Capture lays the groundwork for advancing human-like sensory representations in AI, emphasizing scalability, accessibility, and real-world applicability.
Hearing Anything Anywhere
Jun 11, 2024

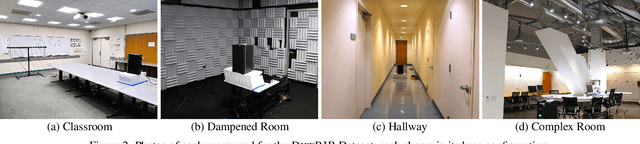

Recent years have seen immense progress in 3D computer vision and computer graphics, with emerging tools that can virtualize real-world 3D environments for numerous Mixed Reality (XR) applications. However, alongside immersive visual experiences, immersive auditory experiences are equally vital to our holistic perception of an environment. In this paper, we aim to reconstruct the spatial acoustic characteristics of an arbitrary environment given only a sparse set of (roughly 12) room impulse response (RIR) recordings and a planar reconstruction of the scene, a setup that is easily achievable by ordinary users. To this end, we introduce DiffRIR, a differentiable RIR rendering framework with interpretable parametric models of salient acoustic features of the scene, including sound source directivity and surface reflectivity. This allows us to synthesize novel auditory experiences through the space with any source audio. To evaluate our method, we collect a dataset of RIR recordings and music in four diverse, real environments. We show that our model outperforms state-ofthe-art baselines on rendering monaural and binaural RIRs and music at unseen locations, and learns physically interpretable parameters characterizing acoustic properties of the sound source and surfaces in the scene.
SoundCam: A Dataset for Finding Humans Using Room Acoustics
Nov 06, 2023A room's acoustic properties are a product of the room's geometry, the objects within the room, and their specific positions. A room's acoustic properties can be characterized by its impulse response (RIR) between a source and listener location, or roughly inferred from recordings of natural signals present in the room. Variations in the positions of objects in a room can effect measurable changes in the room's acoustic properties, as characterized by the RIR. Existing datasets of RIRs either do not systematically vary positions of objects in an environment, or they consist of only simulated RIRs. We present SoundCam, the largest dataset of unique RIRs from in-the-wild rooms publicly released to date. It includes 5,000 10-channel real-world measurements of room impulse responses and 2,000 10-channel recordings of music in three different rooms, including a controlled acoustic lab, an in-the-wild living room, and a conference room, with different humans in positions throughout each room. We show that these measurements can be used for interesting tasks, such as detecting and identifying humans, and tracking their positions.
RoboCook: Long-Horizon Elasto-Plastic Object Manipulation with Diverse Tools
Jun 26, 2023Humans excel in complex long-horizon soft body manipulation tasks via flexible tool use: bread baking requires a knife to slice the dough and a rolling pin to flatten it. Often regarded as a hallmark of human cognition, tool use in autonomous robots remains limited due to challenges in understanding tool-object interactions. Here we develop an intelligent robotic system, RoboCook, which perceives, models, and manipulates elasto-plastic objects with various tools. RoboCook uses point cloud scene representations, models tool-object interactions with Graph Neural Networks (GNNs), and combines tool classification with self-supervised policy learning to devise manipulation plans. We demonstrate that from just 20 minutes of real-world interaction data per tool, a general-purpose robot arm can learn complex long-horizon soft object manipulation tasks, such as making dumplings and alphabet letter cookies. Extensive evaluations show that RoboCook substantially outperforms state-of-the-art approaches, exhibits robustness against severe external disturbances, and demonstrates adaptability to different materials.
RealImpact: A Dataset of Impact Sound Fields for Real Objects
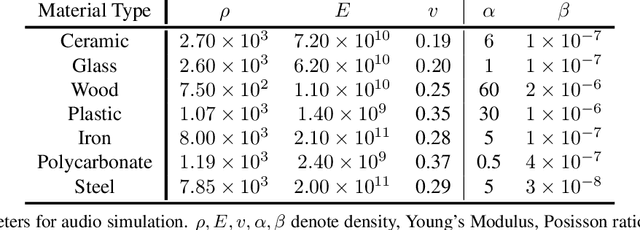
Jun 16, 2023Objects make unique sounds under different perturbations, environment conditions, and poses relative to the listener. While prior works have modeled impact sounds and sound propagation in simulation, we lack a standard dataset of impact sound fields of real objects for audio-visual learning and calibration of the sim-to-real gap. We present RealImpact, a large-scale dataset of real object impact sounds recorded under controlled conditions. RealImpact contains 150,000 recordings of impact sounds of 50 everyday objects with detailed annotations, including their impact locations, microphone locations, contact force profiles, material labels, and RGBD images. We make preliminary attempts to use our dataset as a reference to current simulation methods for estimating object impact sounds that match the real world. Moreover, we demonstrate the usefulness of our dataset as a testbed for acoustic and audio-visual learning via the evaluation of two benchmark tasks, including listener location classification and visual acoustic matching.
ObjectFolder 2.0: A Multisensory Object Dataset for Sim2Real Transfer
Apr 05, 2022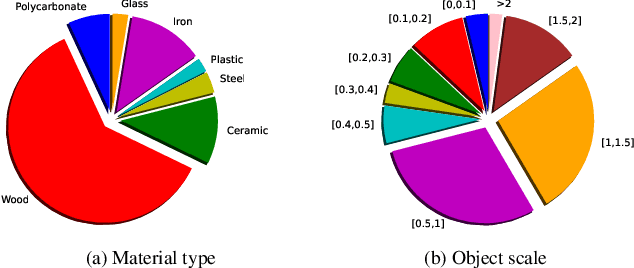
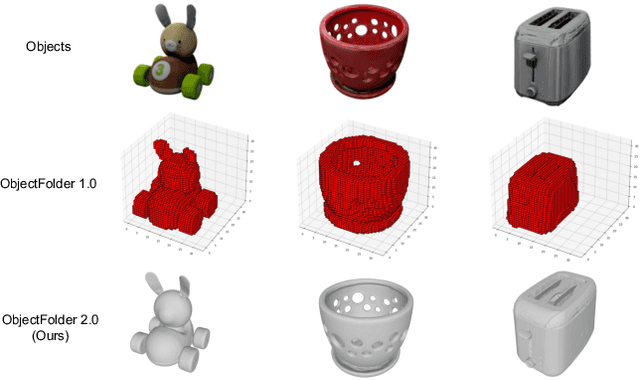
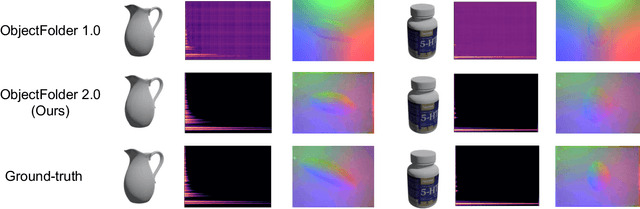
Objects play a crucial role in our everyday activities. Though multisensory object-centric learning has shown great potential lately, the modeling of objects in prior work is rather unrealistic. ObjectFolder 1.0 is a recent dataset that introduces 100 virtualized objects with visual, acoustic, and tactile sensory data. However, the dataset is small in scale and the multisensory data is of limited quality, hampering generalization to real-world scenarios. We present ObjectFolder 2.0, a large-scale, multisensory dataset of common household objects in the form of implicit neural representations that significantly enhances ObjectFolder 1.0 in three aspects. First, our dataset is 10 times larger in the amount of objects and orders of magnitude faster in rendering time. Second, we significantly improve the multisensory rendering quality for all three modalities. Third, we show that models learned from virtual objects in our dataset successfully transfer to their real-world counterparts in three challenging tasks: object scale estimation, contact localization, and shape reconstruction. ObjectFolder 2.0 offers a new path and testbed for multisensory learning in computer vision and robotics. The dataset is available at https://github.com/rhgao/ObjectFolder.