 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoint-VOS: Pointing Up Video Object Segmentation
Feb 08, 2024



Current state-of-the-art Video Object Segmentation (VOS) methods rely on dense per-object mask annotations both during training and testing. This requires time-consuming and costly video annotation mechanisms. We propose a novel Point-VOS task with a spatio-temporally sparse point-wise annotation scheme that substantially reduces the annotation effort. We apply our annotation scheme to two large-scale video datasets with text descriptions and annotate over 19M points across 133K objects in 32K videos. Based on our annotations, we propose a new Point-VOS benchmark, and a corresponding point-based training mechanism, which we use to establish strong baseline results. We show that existing VOS methods can easily be adapted to leverage our point annotations during training, and can achieve results close to the fully-supervised performance when trained on pseudo-masks generated from these points. In addition, we show that our data can be used to improve models that connect vision and language, by evaluating it on the Video Narrative Grounding (VNG) task. We will make our code and annotations available at https://pointvos.github.io.
AGILE3D: Attention Guided Interactive Multi-object 3D Segmentation
Jun 01, 2023



During interactive segmentation, a model and a user work together to delineate objects of interest in a 3D point cloud. In an iterative process, the model assigns each data point to an object (or the background), while the user corrects errors in the resulting segmentation and feeds them back into the model. From a machine learning perspective the goal is to design the model and the feedback mechanism in a way that minimizes the required user input. The current best practice segments objects one at a time, and asks the user to provide positive clicks to indicate regions wrongly assigned to the background and negative clicks to indicate regions wrongly assigned to the object (foreground). Sequentially visiting objects is wasteful, since it disregards synergies between objects: a positive click for a given object can, by definition, serve as a negative click for nearby objects, moreover a direct competition between adjacent objects can speed up the identification of their common boundary. We introduce AGILE3D, an efficient, attention-based model that (1) supports simultaneous segmentation of multiple 3D objects, (2) yields more accurate segmentation masks with fewer user clicks, and (3) offers faster inference. We encode the point cloud into a latent feature representation, and view user clicks as queries and employ cross-attention to represent contextual relations between different click locations as well as between clicks and the 3D point cloud features. Every time new clicks are added, we only need to run a lightweight decoder that produces updated segmentation masks. In experiments with four different point cloud datasets, AGILE3D sets a new state of the art, moreover, we also verify its practicality in real-world setups with a real user study.
DynaMITe: Dynamic Query Bootstrapping for Multi-object Interactive Segmentation Transformer
Apr 13, 2023Most state-of-the-art instance segmentation methods rely on large amounts of pixel-precise ground-truth annotations for training, which are expensive to create. Interactive segmentation networks help generate such annotations based on an image and the corresponding user interactions such as clicks. Existing methods for this task can only process a single instance at a time and each user interaction requires a full forward pass through the entire deep network. We introduce a more efficient approach, called DynaMITe, in which we represent user interactions as spatio-temporal queries to a Transformer decoder with a potential to segment multiple object instances in a single iteration. Our architecture also alleviates any need to re-compute image features during refinement, and requires fewer interactions for segmenting multiple instances in a single image when compared to other methods. DynaMITe achieves state-of-the-art results on multiple existing interactive segmentation benchmarks, and also on the new multi-instance benchmark that we propose in this paper.
4D-StOP: Panoptic Segmentation of 4D LiDAR using Spatio-temporal Object Proposal Generation and Aggregation
Sep 29, 2022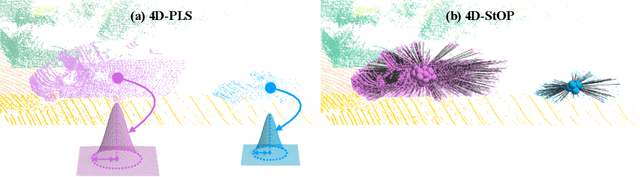
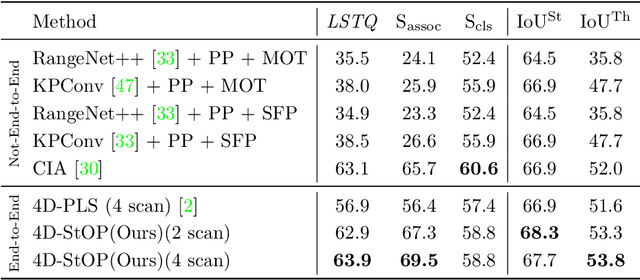
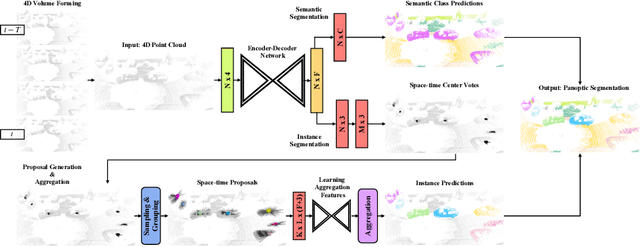
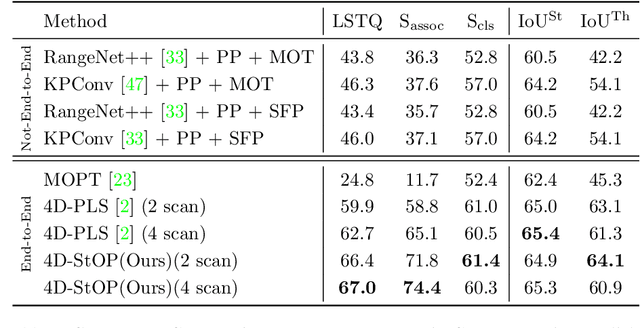
In this work, we present a new paradigm, called 4D-StOP, to tackle the task of 4D Panoptic LiDAR Segmentation. 4D-StOP first generates spatio-temporal proposals using voting-based center predictions, where each point in the 4D volume votes for a corresponding center. These tracklet proposals are further aggregated using learned geometric features. The tracklet aggregation method effectively generates a video-level 4D scene representation over the entire space-time volume. This is in contrast to existing end-to-end trainable state-of-the-art approaches which use spatio-temporal embeddings that are represented by Gaussian probability distributions. Our voting-based tracklet generation method followed by geometric feature-based aggregation generates significantly improved panoptic LiDAR segmentation quality when compared to modeling the entire 4D volume using Gaussian probability distributions. 4D-StOP achieves a new state-of-the-art when applied to the SemanticKITTI test dataset with a score of 63.9 LSTQ, which is a large (+7%) improvement compared to current best-performing end-to-end trainable methods. The code and pre-trained models are available at: https://github.com/LarsKreuzberg/4D-StOP.
D^2Conv3D: Dynamic Dilated Convolutions for Object Segmentation in Videos
Nov 15, 2021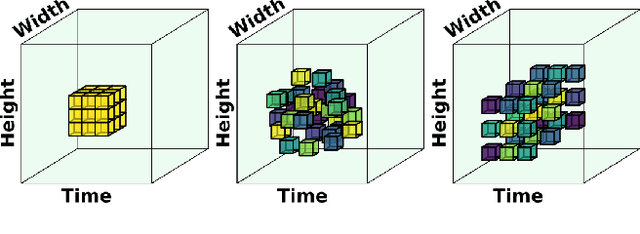
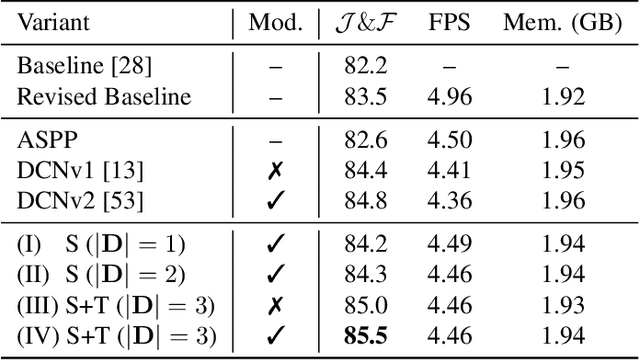
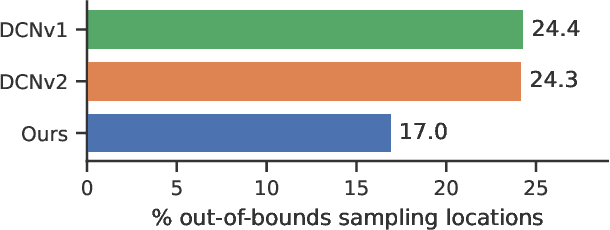

Despite receiving significant attention from the research community, the task of segmenting and tracking objects in monocular videos still has much room for improvement. Existing works have simultaneously justified the efficacy of dilated and deformable convolutions for various image-level segmentation tasks. This gives reason to believe that 3D extensions of such convolutions should also yield performance improvements for video-level segmentation tasks. However, this aspect has not yet been explored thoroughly in existing literature. In this paper, we propose Dynamic Dilated Convolutions (D^2Conv3D): a novel type of convolution which draws inspiration from dilated and deformable convolutions and extends them to the 3D (spatio-temporal) domain. We experimentally show that D^2Conv3D can be used to improve the performance of multiple 3D CNN architectures across multiple video segmentation related benchmarks by simply employing D^2Conv3D as a drop-in replacement for standard convolutions. We further show that D^2Conv3D out-performs trivial extensions of existing dilated and deformable convolutions to 3D. Lastly, we set a new state-of-the-art on the DAVIS 2016 Unsupervised Video Object Segmentation benchmark. Code is made publicly available at https://github.com/Schmiddo/d2conv3d .
Making a Case for 3D Convolutions for Object Segmentation in Videos
Aug 26, 2020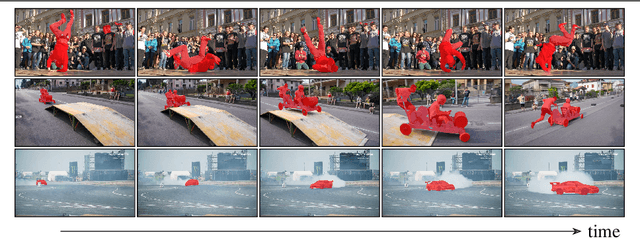
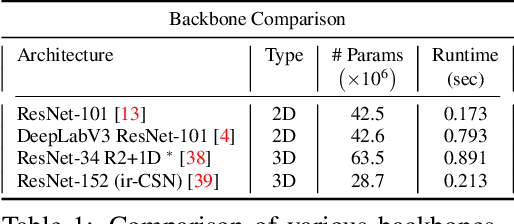
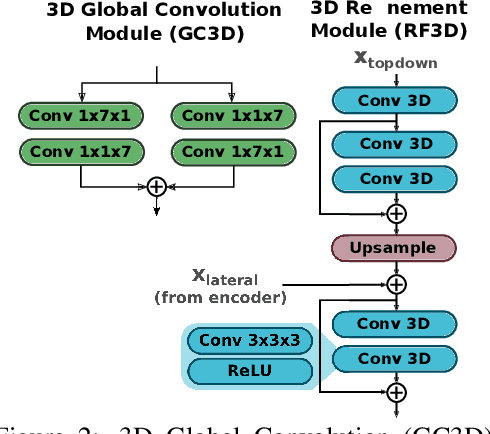
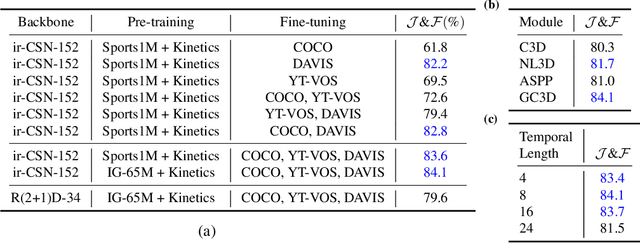
The task of object segmentation in videos is usually accomplished by processing appearance and motion information separately using standard 2D convolutional networks, followed by a learned fusion of the two sources of information. On the other hand, 3D convolutional networks have been successfully applied for video classification tasks, but have not been leveraged as effectively to problems involving dense per-pixel interpretation of videos compared to their 2D convolutional counterparts and lag behind the aforementioned networks in terms of performance. In this work, we show that 3D CNNs can be effectively applied to dense video prediction tasks such as salient object segmentation. We propose a simple yet effective encoder-decoder network architecture consisting entirely of 3D convolutions that can be trained end-to-end using a standard cross-entropy loss. To this end, we leverage an efficient 3D encoder, and propose a 3D decoder architecture, that comprises novel 3D Global Convolution layers and 3D Refinement modules. Our approach outperforms existing state-of-the-arts by a large margin on the DAVIS'16 Unsupervised, FBMS and ViSal dataset benchmarks in addition to being faster, thus showing that our architecture can efficiently learn expressive spatio-temporal features and produce high quality video segmentation masks. Our code and models will be made publicly available.
STEm-Seg: Spatio-temporal Embeddings for Instance Segmentation in Videos
Apr 10, 2020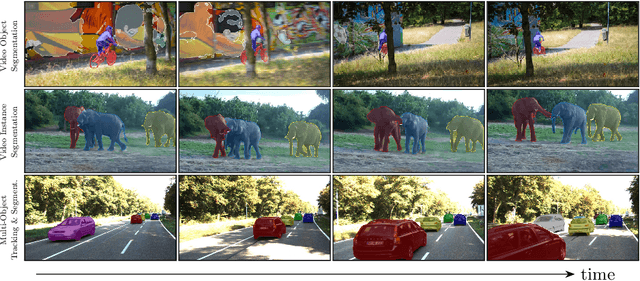
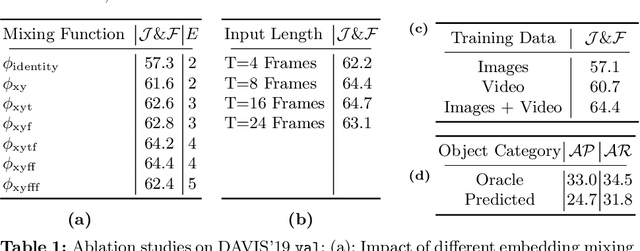

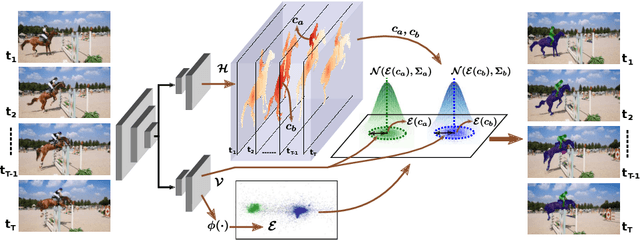
Existing methods for instance segmentation in videos typically involve multi-stage pipelines that follow the tracking-by-detection paradigm and model a video clip as a sequence of images. Multiple networks are used to detect objects in individual frames, and then associate these detections over time. Hence, these methods are often non-end-to-end trainable and highly tailored to specific tasks. In this paper, we propose a different approach that is well-suited to a variety of tasks involving instance segmentation in videos. In particular, we model a video clip as a single 3D spatio-temporal volume, and propose a novel approach that segments and tracks instances across space and time in a single stage. Our problem formulation is centered around the idea of spatio-temporal embeddings which are trained to cluster pixels belonging to a specific object instance over an entire video clip. To this end, we introduce (i) novel mixing functions that enhance the feature representation of spatio-temporal embeddings, and (ii) a single-stage, proposal-free network that can reason about temporal context. Our network is trained end-to-end to learn spatio-temporal embeddings as well as parameters required to cluster these embeddings, thus simplifying inference. Our method achieves state-of-the-art results across multiple datasets and tasks.
Iteratively Trained Interactive Segmentation
May 11, 2018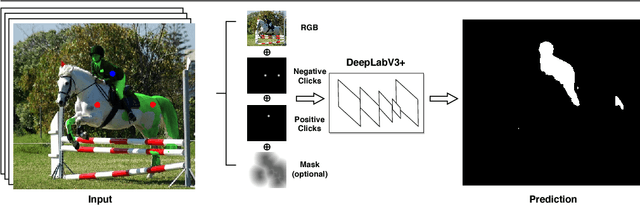
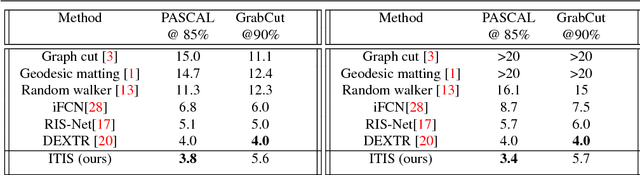


Deep learning requires large amounts of training data to be effective. For the task of object segmentation, manually labeling data is very expensive, and hence interactive methods are needed. Following recent approaches, we develop an interactive object segmentation system which uses user input in the form of clicks as the input to a convolutional network. While previous methods use heuristic click sampling strategies to emulate user clicks during training, we propose a new iterative training strategy. During training, we iteratively add clicks based on the errors of the currently predicted segmentation. We show that our iterative training strategy together with additional improvements to the network architecture results in improved results over the state-of-the-art.