 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpiking CenterNet: A Distillation-boosted Spiking Neural Network for Object Detection
Feb 02, 2024In the era of AI at the edge, self-driving cars, and climate change, the need for energy-efficient, small, embedded AI is growing. Spiking Neural Networks (SNNs) are a promising approach to address this challenge, with their event-driven information flow and sparse activations. We propose Spiking CenterNet for object detection on event data. It combines an SNN CenterNet adaptation with an efficient M2U-Net-based decoder. Our model significantly outperforms comparable previous work on Prophesee's challenging GEN1 Automotive Detection Dataset while using less than half the energy. Distilling the knowledge of a non-spiking teacher into our SNN further increases performance. To the best of our knowledge, our work is the first approach that takes advantage of knowledge distillation in the field of spiking object detection.
4D-StOP: Panoptic Segmentation of 4D LiDAR using Spatio-temporal Object Proposal Generation and Aggregation
Sep 29, 2022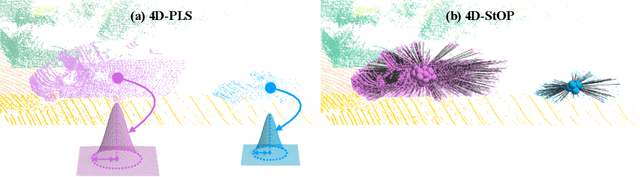
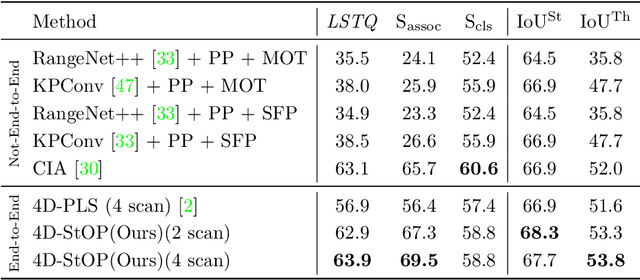
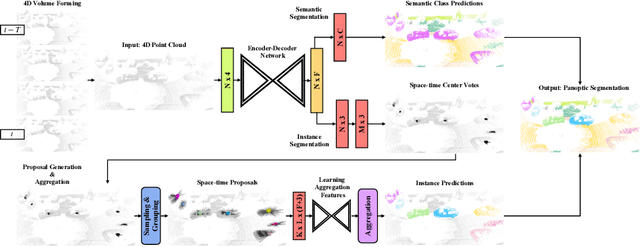
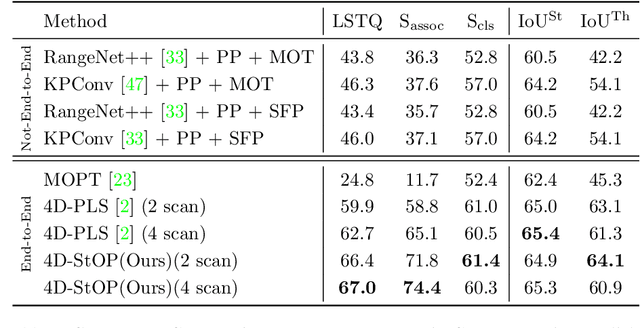
In this work, we present a new paradigm, called 4D-StOP, to tackle the task of 4D Panoptic LiDAR Segmentation. 4D-StOP first generates spatio-temporal proposals using voting-based center predictions, where each point in the 4D volume votes for a corresponding center. These tracklet proposals are further aggregated using learned geometric features. The tracklet aggregation method effectively generates a video-level 4D scene representation over the entire space-time volume. This is in contrast to existing end-to-end trainable state-of-the-art approaches which use spatio-temporal embeddings that are represented by Gaussian probability distributions. Our voting-based tracklet generation method followed by geometric feature-based aggregation generates significantly improved panoptic LiDAR segmentation quality when compared to modeling the entire 4D volume using Gaussian probability distributions. 4D-StOP achieves a new state-of-the-art when applied to the SemanticKITTI test dataset with a score of 63.9 LSTQ, which is a large (+7%) improvement compared to current best-performing end-to-end trainable methods. The code and pre-trained models are available at: https://github.com/LarsKreuzberg/4D-StOP.