 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Any Camera: Zero-Shot Metric Depth Estimation from Any Camera
Jan 05, 2025



While recent depth estimation methods exhibit strong zero-shot generalization, achieving accurate metric depth across diverse camera types-particularly those with large fields of view (FoV) such as fisheye and 360-degree cameras-remains a significant challenge. This paper presents Depth Any Camera (DAC), a powerful zero-shot metric depth estimation framework that extends a perspective-trained model to effectively handle cameras with varying FoVs. The framework is designed to ensure that all existing 3D data can be leveraged, regardless of the specific camera types used in new applications. Remarkably, DAC is trained exclusively on perspective images but generalizes seamlessly to fisheye and 360-degree cameras without the need for specialized training data. DAC employs Equi-Rectangular Projection (ERP) as a unified image representation, enabling consistent processing of images with diverse FoVs. Its key components include a pitch-aware Image-to-ERP conversion for efficient online augmentation in ERP space, a FoV alignment operation to support effective training across a wide range of FoVs, and multi-resolution data augmentation to address resolution disparities between training and testing. DAC achieves state-of-the-art zero-shot metric depth estimation, improving delta-1 ($\delta_1$) accuracy by up to 50% on multiple fisheye and 360-degree datasets compared to prior metric depth foundation models, demonstrating robust generalization across camera types.
Scale-Invariant Monocular Depth Estimation via SSI Depth
Jun 13, 2024



Existing methods for scale-invariant monocular depth estimation (SI MDE) often struggle due to the complexity of the task, and limited and non-diverse datasets, hindering generalizability in real-world scenarios. This is while shift-and-scale-invariant (SSI) depth estimation, simplifying the task and enabling training with abundant stereo datasets achieves high performance. We present a novel approach that leverages SSI inputs to enhance SI depth estimation, streamlining the network's role and facilitating in-the-wild generalization for SI depth estimation while only using a synthetic dataset for training. Emphasizing the generation of high-resolution details, we introduce a novel sparse ordinal loss that substantially improves detail generation in SSI MDE, addressing critical limitations in existing approaches. Through in-the-wild qualitative examples and zero-shot evaluation we substantiate the practical utility of our approach in computational photography applications, showcasing its ability to generate highly detailed SI depth maps and achieve generalization in diverse scenarios.
Intrinsic Harmonization for Illumination-Aware Compositing
Dec 07, 2023
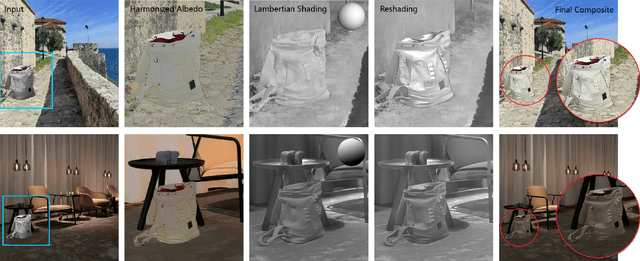

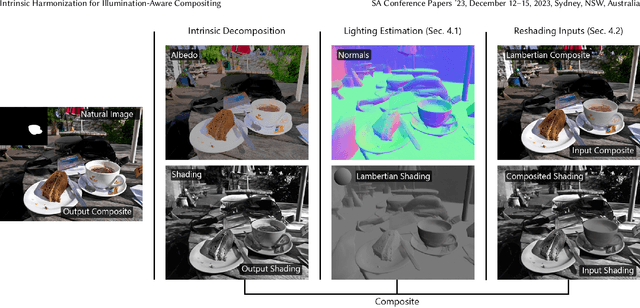
Despite significant advancements in network-based image harmonization techniques, there still exists a domain disparity between typical training pairs and real-world composites encountered during inference. Most existing methods are trained to reverse global edits made on segmented image regions, which fail to accurately capture the lighting inconsistencies between the foreground and background found in composited images. In this work, we introduce a self-supervised illumination harmonization approach formulated in the intrinsic image domain. First, we estimate a simple global lighting model from mid-level vision representations to generate a rough shading for the foreground region. A network then refines this inferred shading to generate a harmonious re-shading that aligns with the background scene. In order to match the color appearance of the foreground and background, we utilize ideas from prior harmonization approaches to perform parameterized image edits in the albedo domain. To validate the effectiveness of our approach, we present results from challenging real-world composites and conduct a user study to objectively measure the enhanced realism achieved compared to state-of-the-art harmonization methods.
Realistic Saliency Guided Image Enhancement
Jun 09, 2023



Common editing operations performed by professional photographers include the cleanup operations: de-emphasizing distracting elements and enhancing subjects. These edits are challenging, requiring a delicate balance between manipulating the viewer's attention while maintaining photo realism. While recent approaches can boast successful examples of attention attenuation or amplification, most of them also suffer from frequent unrealistic edits. We propose a realism loss for saliency-guided image enhancement to maintain high realism across varying image types, while attenuating distractors and amplifying objects of interest. Evaluations with professional photographers confirm that we achieve the dual objective of realism and effectiveness, and outperform the recent approaches on their own datasets, while requiring a smaller memory footprint and runtime. We thus offer a viable solution for automating image enhancement and photo cleanup operations.
* For more info visit http://yaksoy.github.io/realisticEditing/
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging
May 28, 2021

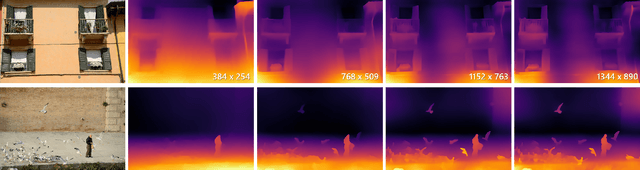
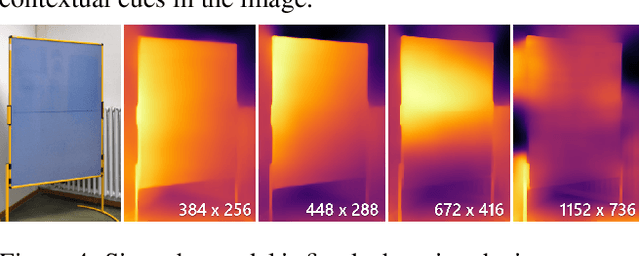
Neural networks have shown great abilities in estimating depth from a single image. However, the inferred depth maps are well below one-megapixel resolution and often lack fine-grained details, which limits their practicality. Our method builds on our analysis on how the input resolution and the scene structure affects depth estimation performance. We demonstrate that there is a trade-off between a consistent scene structure and the high-frequency details, and merge low- and high-resolution estimations to take advantage of this duality using a simple depth merging network. We present a double estimation method that improves the whole-image depth estimation and a patch selection method that adds local details to the final result. We demonstrate that by merging estimations at different resolutions with changing context, we can generate multi-megapixel depth maps with a high level of detail using a pre-trained model.
* For more details visit http://yaksoy.github.io/highresdepth/