 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrinsic Single-Image HDR Reconstruction
Sep 20, 2024The low dynamic range (LDR) of common cameras fails to capture the rich contrast in natural scenes, resulting in loss of color and details in saturated pixels. Reconstructing the high dynamic range (HDR) of luminance present in the scene from single LDR photographs is an important task with many applications in computational photography and realistic display of images. The HDR reconstruction task aims to infer the lost details using the context present in the scene, requiring neural networks to understand high-level geometric and illumination cues. This makes it challenging for data-driven algorithms to generate accurate and high-resolution results. In this work, we introduce a physically-inspired remodeling of the HDR reconstruction problem in the intrinsic domain. The intrinsic model allows us to train separate networks to extend the dynamic range in the shading domain and to recover lost color details in the albedo domain. We show that dividing the problem into two simpler sub-tasks improves performance in a wide variety of photographs.
A Bottom-Up Approach to Class-Agnostic Image Segmentation
Sep 20, 2024Class-agnostic image segmentation is a crucial component in automating image editing workflows, especially in contexts where object selection traditionally involves interactive tools. Existing methods in the literature often adhere to top-down formulations, following the paradigm of class-based approaches, where object detection precedes per-object segmentation. In this work, we present a novel bottom-up formulation for addressing the class-agnostic segmentation problem. We supervise our network directly on the projective sphere of its feature space, employing losses inspired by metric learning literature as well as losses defined in a novel segmentation-space representation. The segmentation results are obtained through a straightforward mean-shift clustering of the estimated features. Our bottom-up formulation exhibits exceptional generalization capability, even when trained on datasets designed for class-based segmentation. We further showcase the effectiveness of our generic approach by addressing the challenging task of cell and nucleus segmentation. We believe that our bottom-up formulation will offer valuable insights into diverse segmentation challenges in the literature.
Boosting Monocular Depth Estimation Models to High-Resolution via Content-Adaptive Multi-Resolution Merging
May 28, 2021

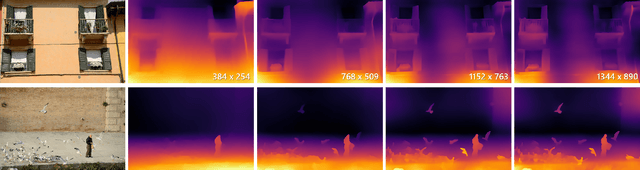
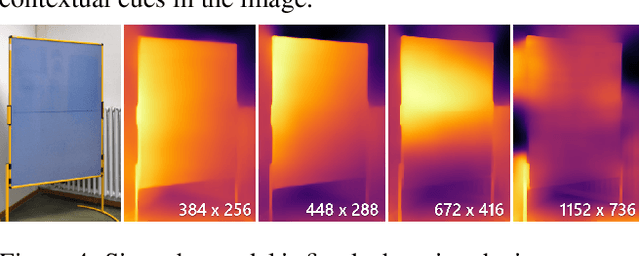
Neural networks have shown great abilities in estimating depth from a single image. However, the inferred depth maps are well below one-megapixel resolution and often lack fine-grained details, which limits their practicality. Our method builds on our analysis on how the input resolution and the scene structure affects depth estimation performance. We demonstrate that there is a trade-off between a consistent scene structure and the high-frequency details, and merge low- and high-resolution estimations to take advantage of this duality using a simple depth merging network. We present a double estimation method that improves the whole-image depth estimation and a patch selection method that adds local details to the final result. We demonstrate that by merging estimations at different resolutions with changing context, we can generate multi-megapixel depth maps with a high level of detail using a pre-trained model.
* For more details visit http://yaksoy.github.io/highresdepth/