 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExact Graph Learning via Integer Programming
Jan 28, 2026Learning the dependence structure among variables in complex systems is a central problem across medical, natural, and social sciences. These structures can be naturally represented by graphs, and the task of inferring such graphs from data is known as graph learning or as causal discovery if the graphs are given a causal interpretation. Existing approaches typically rely on restrictive assumptions about the data-generating process, employ greedy oracle algorithms, or solve approximate formulations of the graph learning problem. As a result, they are either sensitive to violations of central assumptions or fail to guarantee globally optimal solutions. We address these limitations by introducing a nonparametric graph learning framework based on nonparametric conditional independence testing and integer programming. We reformulate the graph learning problem as an integer-programming problem and prove that solving the integer-programming problem provides a globally optimal solution to the original graph learning problem. Our method leverages efficient encodings of graphical separation criteria, enabling the exact recovery of larger graphs than was previously feasible. We provide an implementation in the openly available R package 'glip' which supports learning (acyclic) directed (mixed) graphs and chain graphs. From the resulting output one can compute representations of the corresponding Markov equivalence classes or weak equivalence classes. Empirically, we demonstrate that our approach is faster than other existing exact graph learning procedures for a large fraction of instances and graphs of various sizes. GLIP also achieves state-of-the-art performance on simulated data and benchmark datasets across all aforementioned classes of graphs.
An Asymmetric Independence Model for Causal Discovery on Path Spaces
Mar 12, 2025We develop the theory linking 'E-separation' in directed mixed graphs (DMGs) with conditional independence relations among coordinate processes in stochastic differential equations (SDEs), where causal relationships are determined by "which variables enter the governing equation of which other variables". We prove a global Markov property for cyclic SDEs, which naturally extends to partially observed cyclic SDEs, because our asymmetric independence model is closed under marginalization. We then characterize the class of graphs that encode the same set of independence relations, yielding a result analogous to the seminal 'same skeleton and v-structures' result for directed acyclic graphs (DAGs). In the fully observed case, we show that each such equivalence class of graphs has a greatest element as a parsimonious representation and develop algorithms to identify this greatest element from data. We conjecture that a greatest element also exists under partial observations, which we verify computationally for graphs with up to four nodes.
Signature Kernel Conditional Independence Tests in Causal Discovery for Stochastic Processes
Feb 28, 2024



Inferring the causal structure underlying stochastic dynamical systems from observational data holds great promise in domains ranging from science and health to finance. Such processes can often be accurately modeled via stochastic differential equations (SDEs), which naturally imply causal relationships via "which variables enter the differential of which other variables". In this paper, we develop a kernel-based test of conditional independence (CI) on "path-space" -- solutions to SDEs -- by leveraging recent advances in signature kernels. We demonstrate strictly superior performance of our proposed CI test compared to existing approaches on path-space. Then, we develop constraint-based causal discovery algorithms for acyclic stochastic dynamical systems (allowing for loops) that leverage temporal information to recover the entire directed graph. Assuming faithfulness and a CI oracle, our algorithm is sound and complete. We empirically verify that our developed CI test in conjunction with the causal discovery algorithm reliably outperforms baselines across a range of settings.
Causal discovery in a complex industrial system: A time series benchmark
Oct 28, 2023



Causal discovery outputs a causal structure, represented by a graph, from observed data. For time series data, there is a variety of methods, however, it is difficult to evaluate these on real data as realistic use cases very rarely come with a known causal graph to which output can be compared. In this paper, we present a dataset from an industrial subsystem at the European Spallation Source along with its causal graph which has been constructed from expert knowledge. This provides a testbed for causal discovery from time series observations of complex systems, and we believe this can help inform the development of causal discovery methodology.
Analyzing Complex Systems with Cascades Using Continuous-Time Bayesian Networks
Aug 21, 2023



Interacting systems of events may exhibit cascading behavior where events tend to be temporally clustered. While the cascades themselves may be obvious from the data, it is important to understand which states of the system trigger them. For this purpose, we propose a modeling framework based on continuous-time Bayesian networks (CTBNs) to analyze cascading behavior in complex systems. This framework allows us to describe how events propagate through the system and to identify likely sentry states, that is, system states that may lead to imminent cascading behavior. Moreover, CTBNs have a simple graphical representation and provide interpretable outputs, both of which are important when communicating with domain experts. We also develop new methods for knowledge extraction from CTBNs and we apply the proposed methodology to a data set of alarms in a large industrial system.
Learning by Doing: Controlling a Dynamical System using Causality, Control, and Reinforcement Learning
Feb 12, 2022
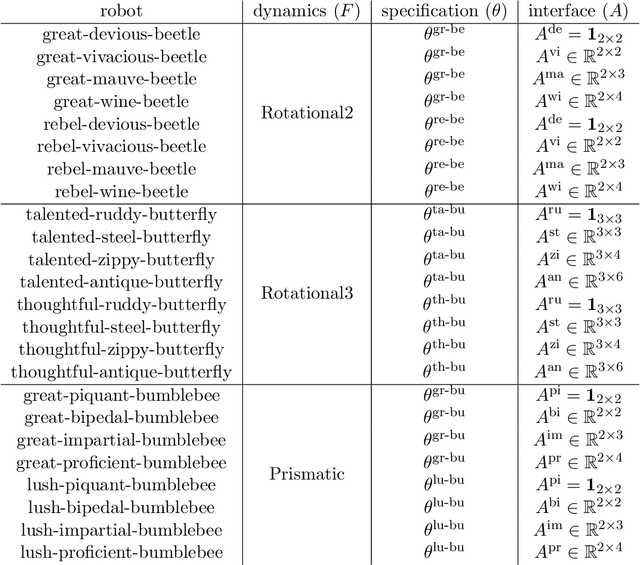


Questions in causality, control, and reinforcement learning go beyond the classical machine learning task of prediction under i.i.d. observations. Instead, these fields consider the problem of learning how to actively perturb a system to achieve a certain effect on a response variable. Arguably, they have complementary views on the problem: In control, one usually aims to first identify the system by excitation strategies to then apply model-based design techniques to control the system. In (non-model-based) reinforcement learning, one directly optimizes a reward. In causality, one focus is on identifiability of causal structure. We believe that combining the different views might create synergies and this competition is meant as a first step toward such synergies. The participants had access to observational and (offline) interventional data generated by dynamical systems. Track CHEM considers an open-loop problem in which a single impulse at the beginning of the dynamics can be set, while Track ROBO considers a closed-loop problem in which control variables can be set at each time step. The goal in both tracks is to infer controls that drive the system to a desired state. Code is open-sourced ( https://github.com/LearningByDoingCompetition/learningbydoing-comp ) to reproduce the winning solutions of the competition and to facilitate trying out new methods on the competition tasks.