 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeONNXExplainer: an ONNX Based Generic Framework to Explain Neural Networks Using Shapley Values
Oct 03, 2023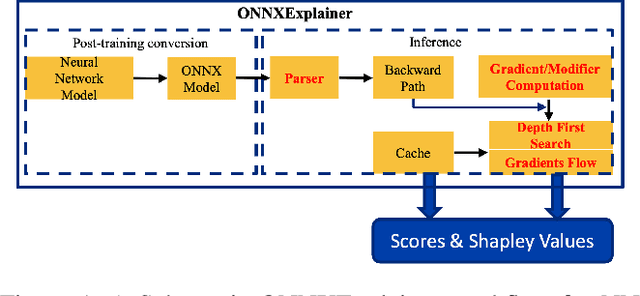
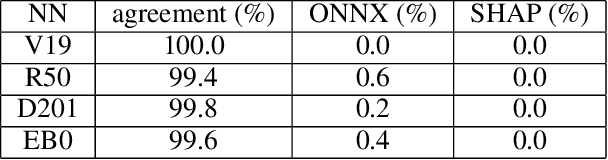

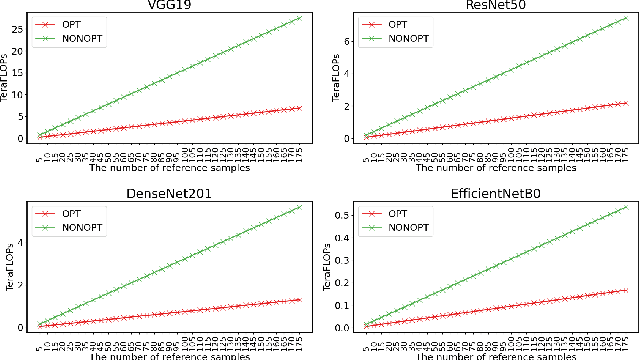
Understanding why a neural network model makes certain decisions can be as important as the inference performance. Various methods have been proposed to help practitioners explain the prediction of a neural network model, of which Shapley values are most popular. SHAP package is a leading implementation of Shapley values to explain neural networks implemented in TensorFlow or PyTorch but lacks cross-platform support, one-shot deployment and is highly inefficient. To address these problems, we present the ONNXExplainer, which is a generic framework to explain neural networks using Shapley values in the ONNX ecosystem. In ONNXExplainer, we develop its own automatic differentiation and optimization approach, which not only enables One-Shot Deployment of neural networks inference and explanations, but also significantly improves the efficiency to compute explanation with less memory consumption. For fair comparison purposes, we also implement the same optimization in TensorFlow and PyTorch and measure its performance against the current state of the art open-source counterpart, SHAP. Extensive benchmarks demonstrate that the proposed optimization approach improves the explanation latency of VGG19, ResNet50, DenseNet201, and EfficientNetB0 by as much as 500%.
TDR-OBCA: A Reliable Planner for Autonomous Driving in Free-Space Environment
Sep 23, 2020
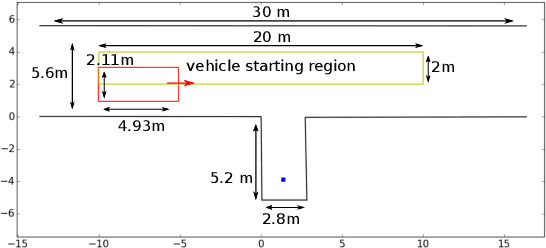
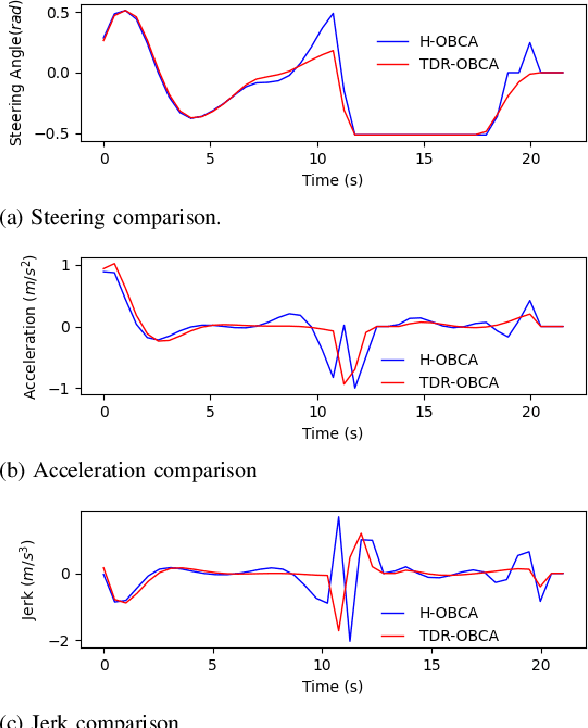

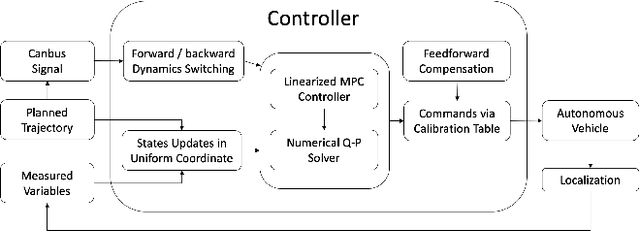
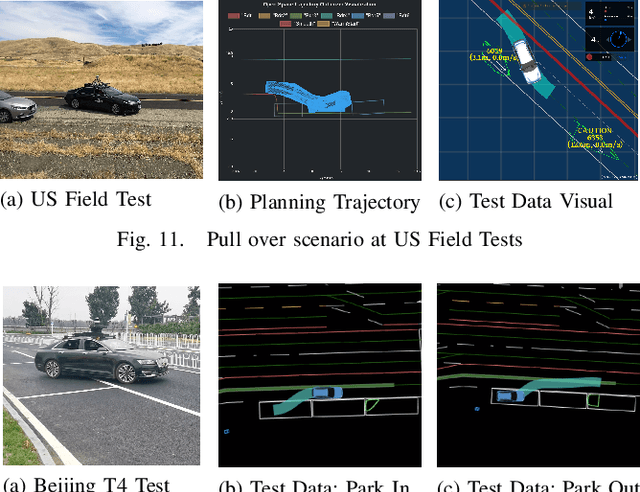
This paper presents an optimization-based collision avoidance trajectory generation method for autonomous driving in free-space environments, with enhanced robust-ness, driving comfort and efficiency. Starting from the hybrid optimization-based framework, we introduces two warm start methods, temporal and dual variable warm starts, to improve the efficiency. We also reformulates the problem to improve the robustness and efficiency. We name this new algorithm TDR-OBCA. With these changes, compared with original hybrid optimization we achieve a 96.67% failure rate decrease with respect to initial conditions, 13.53% increase in driving comforts and 3.33% to 44.82% increase in planner efficiency as obstacles number scales. We validate our results in hundreds of simulation scenarios and hundreds of hours of public road tests in both U.S. and China. Our source code is availableathttps://github.com/ApolloAuto/apollo.
DL-IAPS and PJSO: A Path/Speed Decoupled Trajectory Optimization and its Application in Autonomous Driving
Sep 23, 2020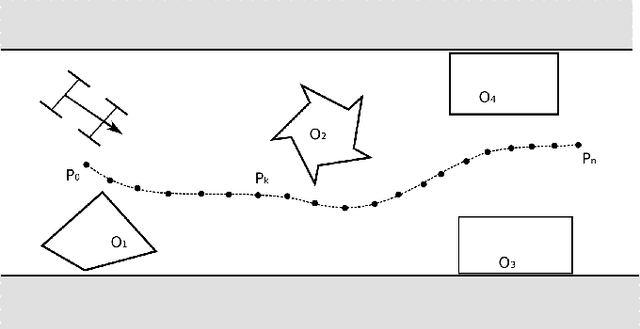
This paper presents a free space trajectory optimization algorithm of autonomous driving vehicle, which decouples the collision-free trajectory planning problem into a Dual-Loop Iterative Anchoring Path Smoothing (DL-IAPS) and a Piece-wise Jerk Speed Optimization (PJSO). The work leads to remarkable driving performance improvements including more precise collision avoidance, higher control feasibility and better driving comfort, as those are often hard to realize in other existing path/speed decoupled trajectory optimization methods. Our algorithm's efficiency, robustness and adaptiveness to complex driving scenarios have been validated by both simulations and real on-road tests.