Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDL-IAPS and PJSO: A Path/Speed Decoupled Trajectory Optimization and its Application in Autonomous Driving
Paper and Code
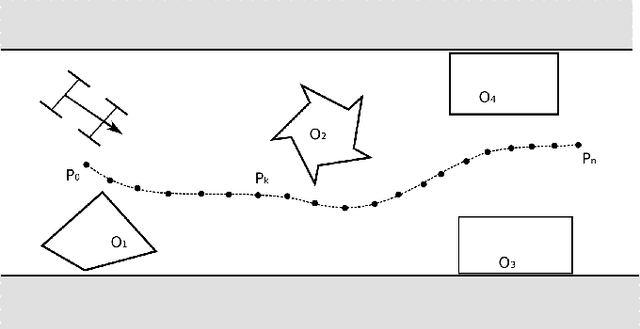
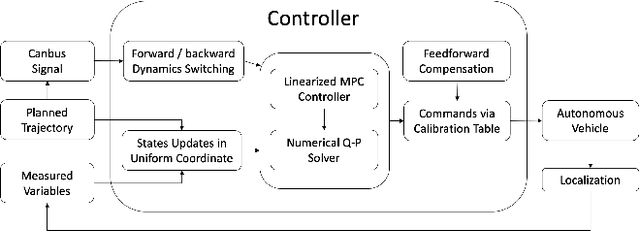
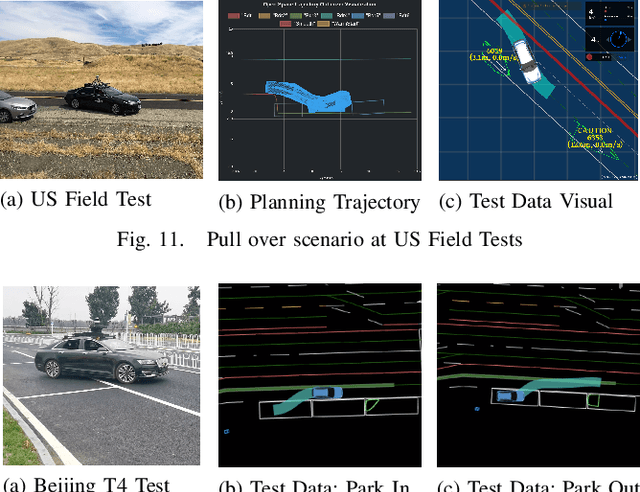
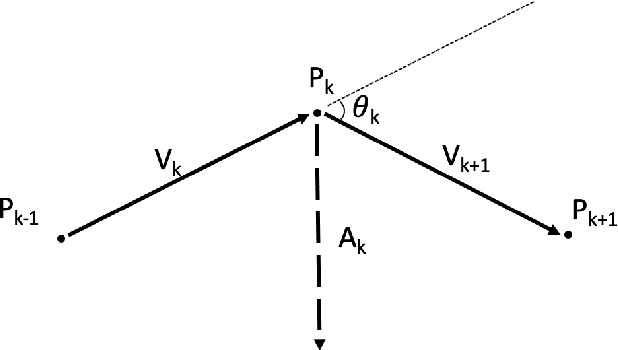
This paper presents a free space trajectory optimization algorithm of autonomous driving vehicle, which decouples the collision-free trajectory planning problem into a Dual-Loop Iterative Anchoring Path Smoothing (DL-IAPS) and a Piece-wise Jerk Speed Optimization (PJSO). The work leads to remarkable driving performance improvements including more precise collision avoidance, higher control feasibility and better driving comfort, as those are often hard to realize in other existing path/speed decoupled trajectory optimization methods. Our algorithm's efficiency, robustness and adaptiveness to complex driving scenarios have been validated by both simulations and real on-road tests.
* 8 pages, 11 figures
View paper on