 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorld In Your Hands: A Large-Scale and Open-source Ecosystem for Learning Human-centric Manipulation in the Wild
Dec 30, 2025Large-scale pre-training is fundamental for generalization in language and vision models, but data for dexterous hand manipulation remains limited in scale and diversity, hindering policy generalization. Limited scenario diversity, misaligned modalities, and insufficient benchmarking constrain current human manipulation datasets. To address these gaps, we introduce World In Your Hands (WiYH), a large-scale open-source ecosystem for human-centric manipulation learning. WiYH includes (1) the Oracle Suite, a wearable data collection kit with an auto-labeling pipeline for accurate motion capture; (2) the WiYH Dataset, featuring over 1,000 hours of multi-modal manipulation data across hundreds of skills in diverse real-world scenarios; and (3) extensive annotations and benchmarks supporting tasks from perception to action. Furthermore, experiments based on the WiYH ecosystem show that integrating WiYH's human-centric data significantly enhances the generalization and robustness of dexterous hand policies in tabletop manipulation tasks. We believe that World In Your Hands will bring new insights into human-centric data collection and policy learning to the community.
Autonomous UAV Landing System Based on Visual Navigation
Oct 29, 2019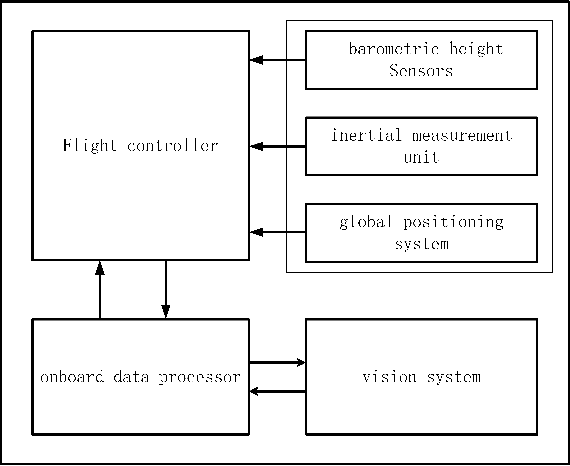

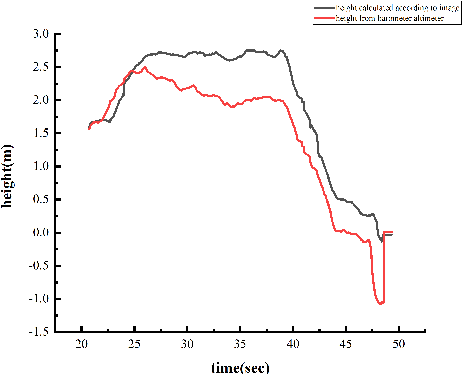
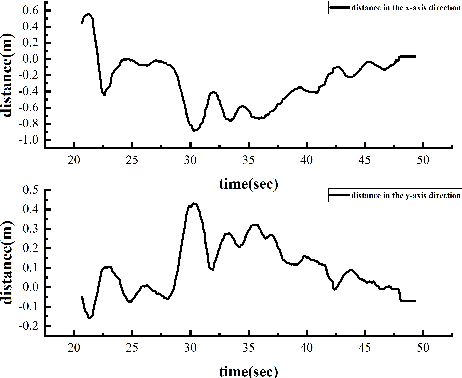
In this paper, we present an autonomous unmanned aerial vehicle (UAV) landing system based on visual navigation. We design the landmark as a topological pattern in order to enable the UAV to distinguish the landmark from the environment easily. In addition, a dynamic thresholding method is developed for image binarization to improve detection efficiency. The relative distance in the horizontal plane is calculated according to effective image information, and the relative height is obtained using a linear interpolation method. The landing experiments are performed on a static and a moving platform, respectively. The experimental results illustrate that our proposed landing system performs robustly and accurately.
PT-ResNet: Perspective Transformation-Based Residual Network for Semantic Road Image Segmentation
Oct 29, 2019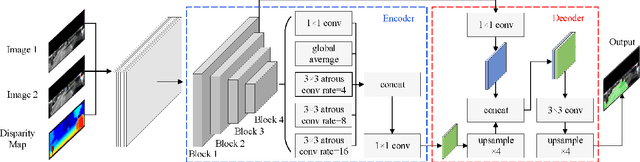
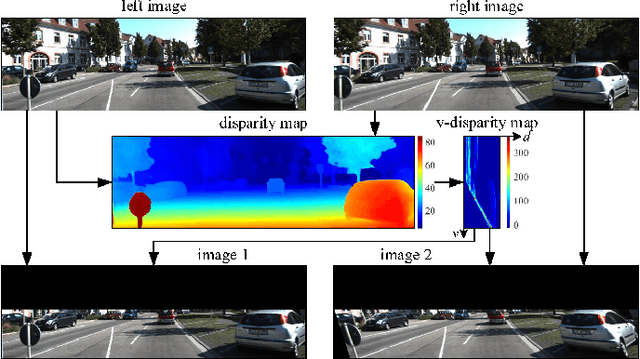
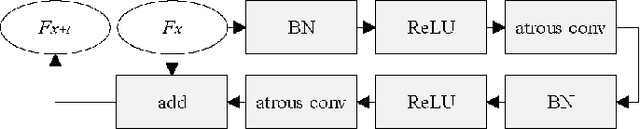
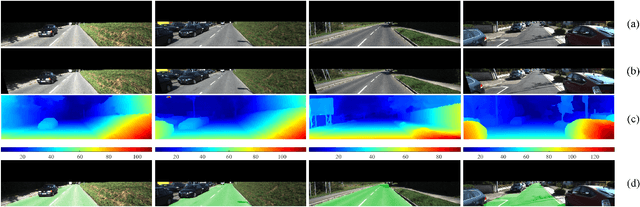
Semantic road region segmentation is a high-level task, which paves the way towards road scene understanding. This paper presents a residual network trained for semantic road segmentation. Firstly, we represent the projections of road disparities in the v-disparity map as a linear model, which can be estimated by optimizing the v-disparity map using dynamic programming. This linear model is then utilized to reduce the redundant information in the left and right road images. The right image is also transformed into the left perspective view, which greatly enhances the road surface similarity between the two images. Finally, the processed stereo images and their disparity maps are concatenated to create a set of 3D images, which are then utilized to train our neural network. The experimental results illustrate that our network achieves a maximum F1-measure of approximately 91.19% when analyzing the images from the KITTI road dataset.