Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous UAV Landing System Based on Visual Navigation
Paper and Code
Oct 29, 2019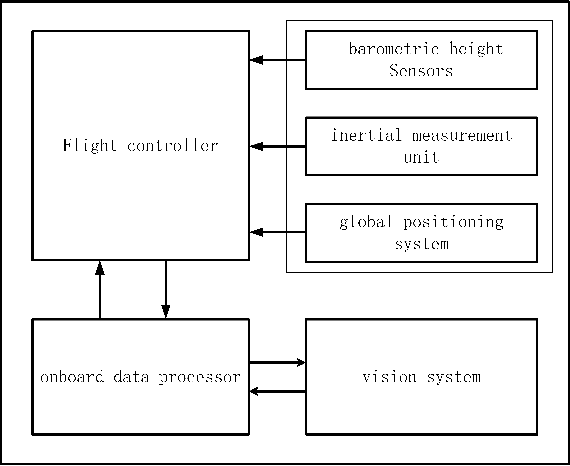

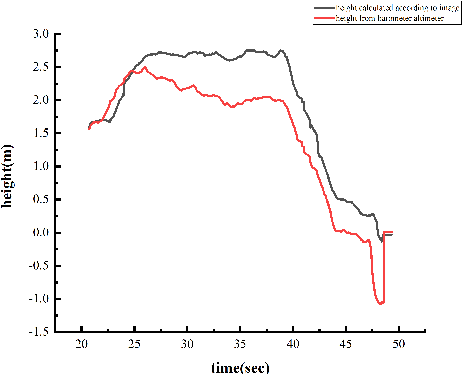
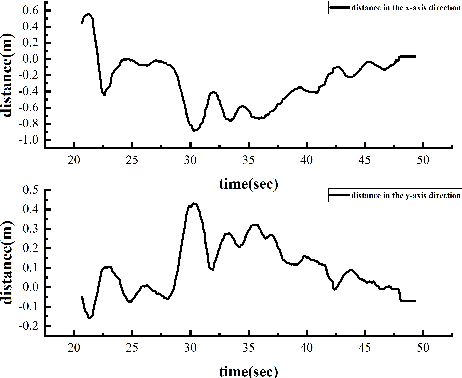
In this paper, we present an autonomous unmanned aerial vehicle (UAV) landing system based on visual navigation. We design the landmark as a topological pattern in order to enable the UAV to distinguish the landmark from the environment easily. In addition, a dynamic thresholding method is developed for image binarization to improve detection efficiency. The relative distance in the horizontal plane is calculated according to effective image information, and the relative height is obtained using a linear interpolation method. The landing experiments are performed on a static and a moving platform, respectively. The experimental results illustrate that our proposed landing system performs robustly and accurately.
* 6 pages, 13 figures, 2019 IEEE International Conference on Imaging
Systems and Techniques (IST)
View paper on