 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStow: Robotic Packing of Items into Fabric Pods
May 07, 2025



This paper presents a compliant manipulation system capable of placing items onto densely packed shelves. The wide diversity of items and strict business requirements for high producing rates and low defect generation have prohibited warehouse robotics from performing this task. Our innovations in hardware, perception, decision-making, motion planning, and control have enabled this system to perform over 500,000 stows in a large e-commerce fulfillment center. The system achieves human levels of packing density and speed while prioritizing work on overhead shelves to enhance the safety of humans working alongside the robots.
LiDARTag: A Real-Time Fiducial Tag using Point Clouds
Aug 23, 2019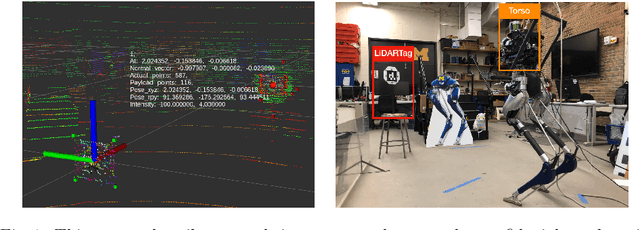
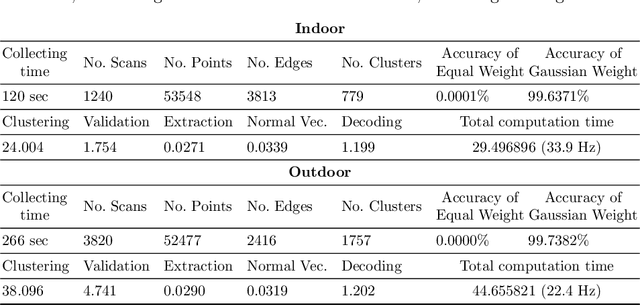
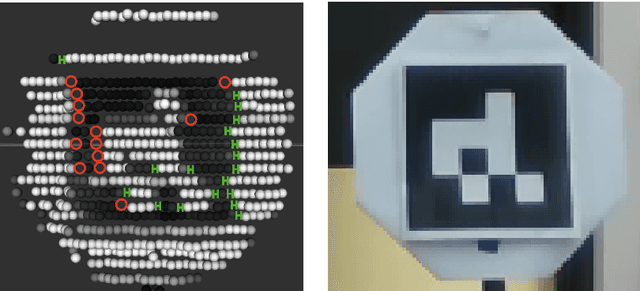
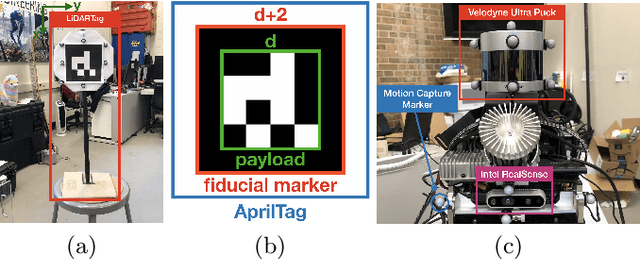
Image-based fiducial markers are widely used in robotics and computer vision problems such as object tracking in cluttered or textureless environments, camera (and multi-sensor) calibration tasks, or vision-based simultaneous localization and mapping (SLAM). The state-of-the-art fiducial marker detection algorithms rely on consistency of the ambient lighting. This paper introduces LiDARTag, a novel fiducial tag design and detection algorithm suitable for light detection and ranging (LiDAR) point clouds. The proposed tag runs in real-time and can process data faster than the currently available LiDAR sensors frequencies. Due to the nature of the LiDAR's sensor, rapidly changing ambient lighting will not affect detection of a LiDARTag; hence, the proposed fiducial marker can operate in a completely dark environment. In addition, the LiDARTag nicely complements available visual fiducial markers as the tag design is compatible with available techniques, such as AprilTags, allowing for efficient multi-sensor fusion and calibration tasks. The experimental results, verified by a motion capture system, confirm the proposed technique can reliably provide a tag's pose and its unique ID code. All implementations are done in C++ and will be available soon at: https://github.com/brucejk/LiDARTag
Contact-Aided Invariant Extended Kalman Filtering for Robot State Estimation
Apr 19, 2019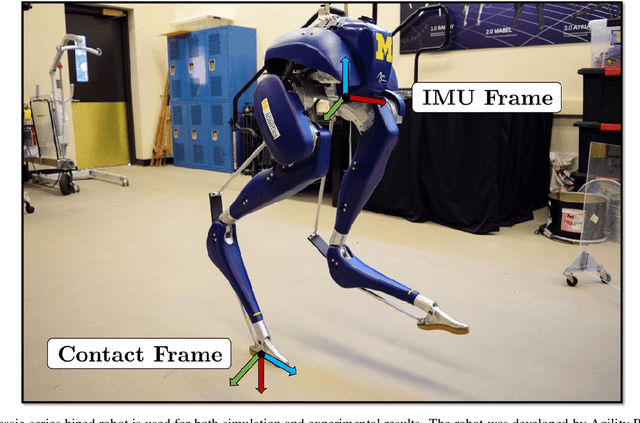
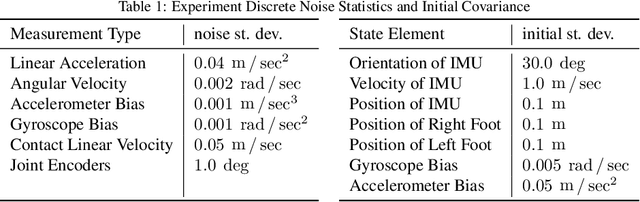
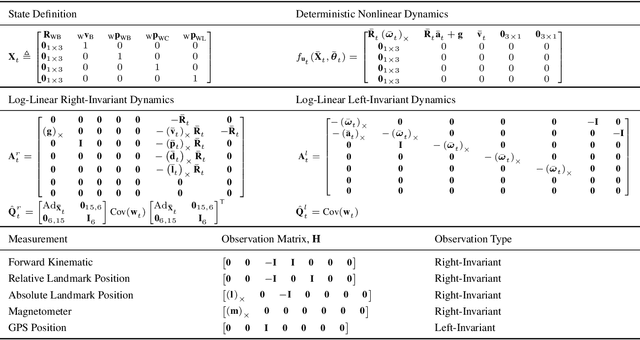
Legged robots require knowledge of pose and velocity in order to maintain stability and execute walking paths. Current solutions either rely on vision data, which is susceptible to environmental and lighting conditions, or fusion of kinematic and contact data with measurements from an inertial measurement unit (IMU). In this work, we develop a contact-aided invariant extended Kalman filter (InEKF) using the theory of Lie groups and invariant observer design. This filter combines contact-inertial dynamics with forward kinematic corrections to estimate pose and velocity along with all current contact points. We show that the error dynamics follows a log-linear autonomous differential equation with several important consequences: (a) the observable state variables can be rendered convergent with a domain of attraction that is independent of the system's trajectory; (b) unlike the standard EKF, neither the linearized error dynamics nor the linearized observation model depend on the current state estimate, which (c) leads to improved convergence properties and (d) a local observability matrix that is consistent with the underlying nonlinear system. Furthermore, we demonstrate how to include IMU biases, add/remove contacts, and formulate both world-centric and robo-centric versions. We compare the convergence of the proposed InEKF with the commonly used quaternion-based EKF though both simulations and experiments on a Cassie-series bipedal robot. Filter accuracy is analyzed using motion capture, while a LiDAR mapping experiment provides a practical use case. Overall, the developed contact-aided InEKF provides better performance in comparison with the quaternion-based EKF as a result of exploiting symmetries present in system.
Rapid Trajectory Optimization Using C-FROST with Illustration on a Cassie-Series Dynamic Walking Biped
Mar 15, 2019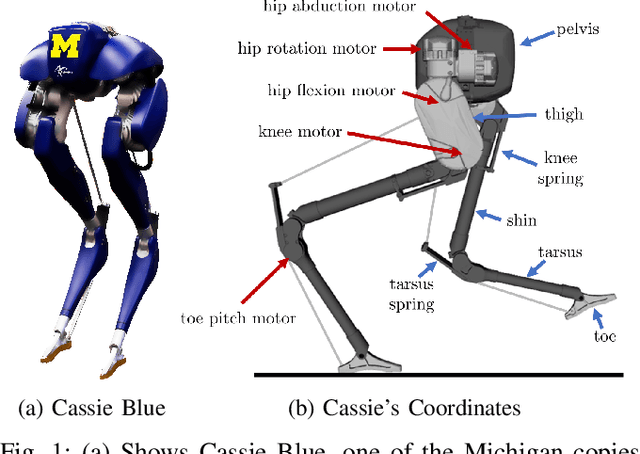
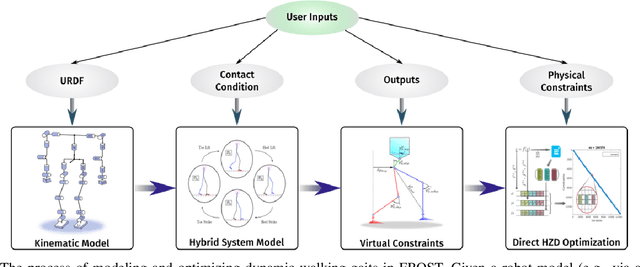
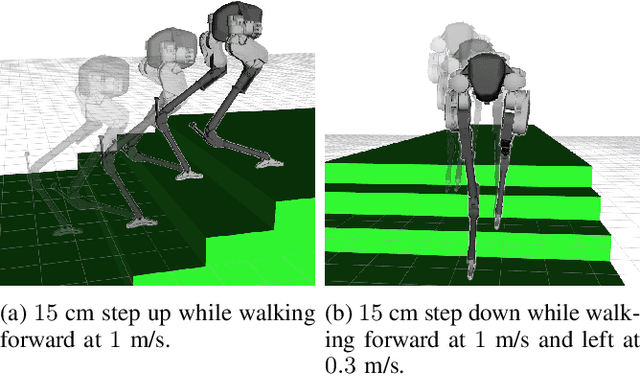
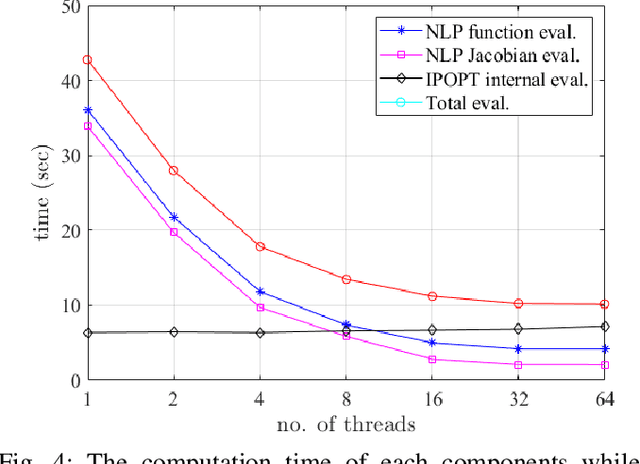
One of the big attractions of low-dimensional models for gait design has been the ability to compute solutions rapidly, whereas one of their drawbacks has been the difficulty in mapping the solutions back to the target robot. This paper presents a set of tools for rapidly determining solutions for ``humanoids'' without removing or lumping degrees of freedom. The main tools are (1) C-FROST, an open-source C++ interface for FROST, a direct collocation optimization tool; and (2) multi-threading. The results will be illustrated on a 20-DoF floating-base model for a Cassie-series bipedal robot through numerical calculations and physical experiments.
Hybrid Contact Preintegration for Visual-Inertial-Contact State Estimation Using Factor Graphs
Oct 02, 2018
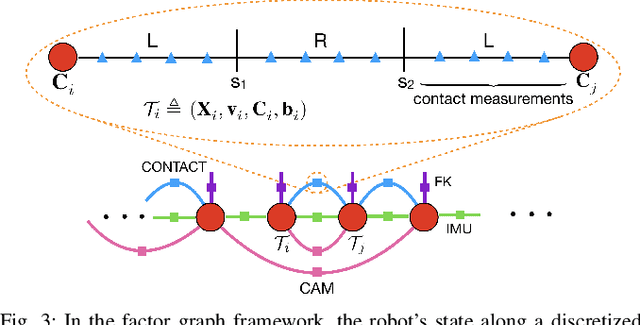
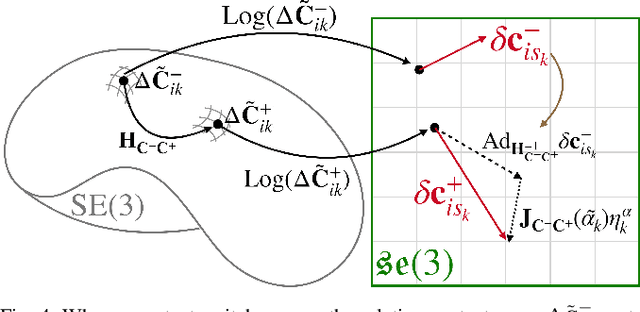
The factor graph framework is a convenient modeling technique for robotic state estimation where states are represented as nodes, and measurements are modeled as factors. When designing a sensor fusion framework for legged robots, one often has access to visual, inertial, joint encoder, and contact sensors. While visual-inertial odometry has been studied extensively in this framework, the addition of a preintegrated contact factor for legged robots has been only recently proposed. This allowed for integration of encoder and contact measurements into existing factor graphs, however, new nodes had to be added to the graph every time contact was made or broken. In this work, to cope with the problem of switching contact frames, we propose a hybrid contact preintegration theory that allows contact information to be integrated through an arbitrary number of contact switches. The proposed hybrid modeling approach reduces the number of required variables in the nonlinear optimization problem by only requiring new states to be added alongside camera or selected keyframes. This method is evaluated using real experimental data collected from a Cassie-series robot where the trajectory of the robot produced by a motion capture system is used as a proxy for ground truth. The evaluation shows that inclusion of the proposed preintegrated hybrid contact factor alongside visual-inertial navigation systems improves estimation accuracy as well as robustness to vision failure, while its generalization makes it more accessible for legged platforms.
Feedback Control of a Cassie Bipedal Robot: Walking, Standing, and Riding a Segway
Sep 19, 2018
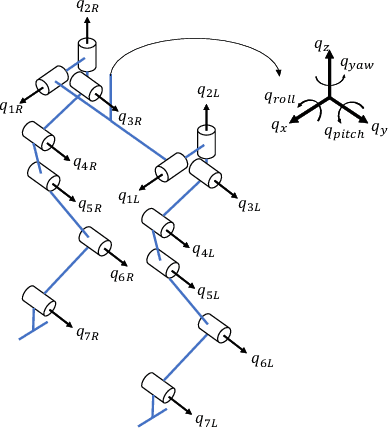
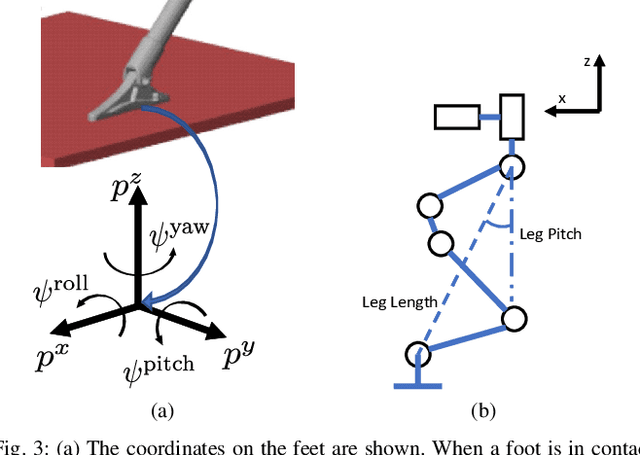
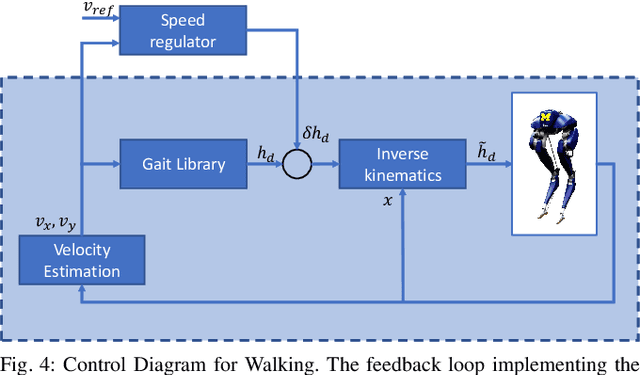
The Cassie bipedal robot designed by Agility Robotics is providing academics a common platform for sharing and comparing algorithms for locomotion, perception, and navigation. This paper focuses on feedback control for standing and walking using the methods of virtual constraints and gait libraries. The designed controller was implemented six weeks after the robot arrived at the University of Michigan and allowed it to stand in place as well as walk over sidewalks, grass, snow, sand, and burning brush. The controller for standing also enables the robot to ride a Segway. A model of the Cassie robot has been placed on GitHub and the controller will also be made open source if the paper is accepted.
Contact-Aided Invariant Extended Kalman Filtering for Legged Robot State Estimation
May 26, 2018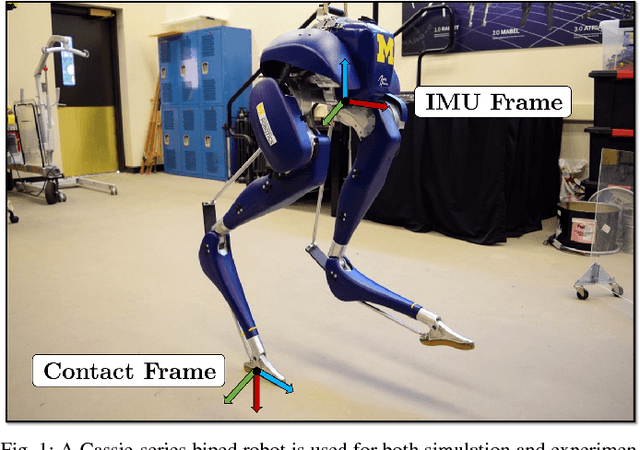
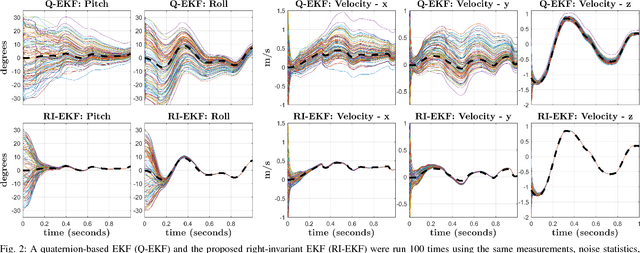
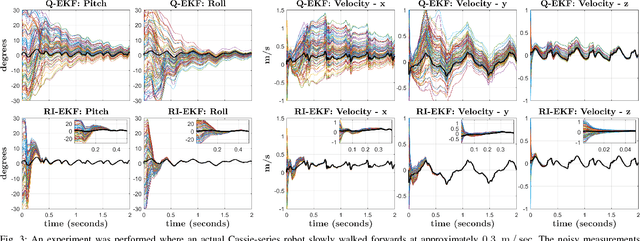
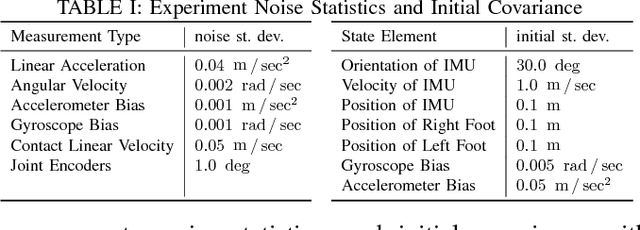
This paper derives a contact-aided inertial navigation observer for a 3D bipedal robot using the theory of invariant observer design. Aided inertial navigation is fundamentally a nonlinear observer design problem; thus, current solutions are based on approximations of the system dynamics, such as an Extended Kalman Filter (EKF), which uses a system's Jacobian linearization along the current best estimate of its trajectory. On the basis of the theory of invariant observer design by Barrau and Bonnabel, and in particular, the Invariant EKF (InEKF), we show that the error dynamics of the point contact-inertial system follows a log-linear autonomous differential equation; hence, the observable state variables can be rendered convergent with a domain of attraction that is independent of the system's trajectory. Due to the log-linear form of the error dynamics, it is not necessary to perform a nonlinear observability analysis to show that when using an Inertial Measurement Unit (IMU) and contact sensors, the absolute position of the robot and a rotation about the gravity vector (yaw) are unobservable. We further augment the state of the developed InEKF with IMU biases, as the online estimation of these parameters has a crucial impact on system performance. We evaluate the convergence of the proposed system with the commonly used quaternion-based EKF observer using a Monte-Carlo simulation. In addition, our experimental evaluation using a Cassie-series bipedal robot shows that the contact-aided InEKF provides better performance in comparison with the quaternion-based EKF as a result of exploiting symmetries present in the system dynamics.
Legged Robot State-Estimation Through Combined Forward Kinematic and Preintegrated Contact Factors
Feb 25, 2018
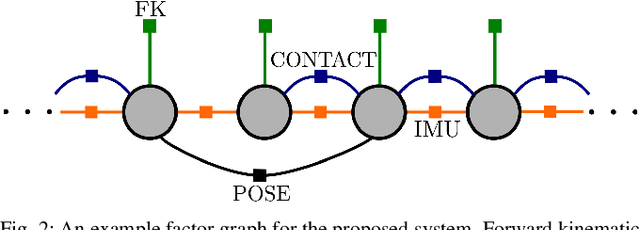

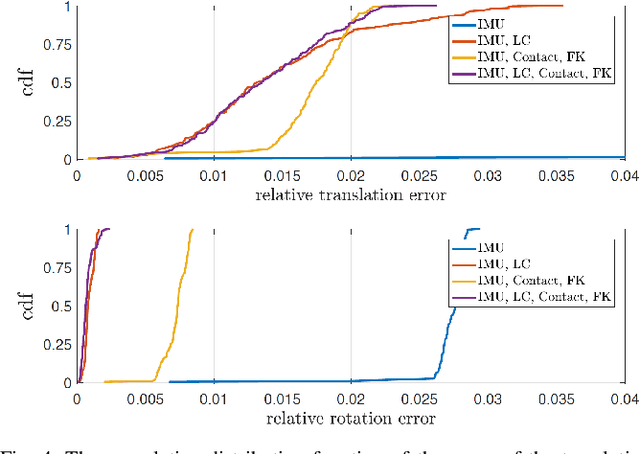
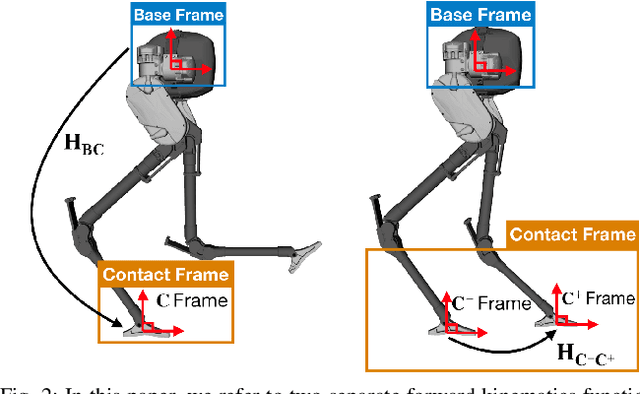
State-of-the-art robotic perception systems have achieved sufficiently good performance using Inertial Measurement Units (IMUs), cameras, and nonlinear optimization techniques, that they are now being deployed as technologies. However, many of these methods rely significantly on vision and often fail when visual tracking is lost due to lighting or scarcity of features. This paper presents a state-estimation technique for legged robots that takes into account the robot's kinematic model as well as its contact with the environment. We introduce forward kinematic factors and preintegrated contact factors into a factor graph framework that can be incrementally solved in real-time. The forward kinematic factor relates the robot's base pose to a contact frame through noisy encoder measurements. The preintegrated contact factor provides odometry measurements of this contact frame while accounting for possible foot slippage. Together, the two developed factors constrain the graph optimization problem allowing the robot's trajectory to be estimated. The paper evaluates the method using simulated and real sensory IMU and kinematic data from experiments with a Cassie-series robot designed by Agility Robotics. These preliminary experiments show that using the proposed method in addition to IMU decreases drift and improves localization accuracy, suggesting that its use can enable successful recovery from a loss of visual tracking.