 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Trajectory Optimization Using C-FROST with Illustration on a Cassie-Series Dynamic Walking Biped
Mar 15, 2019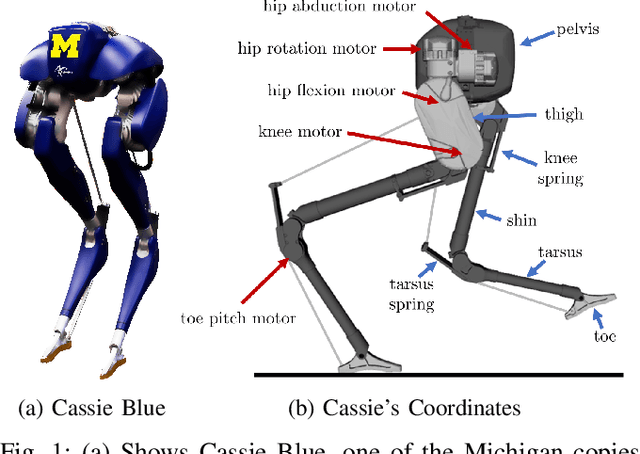
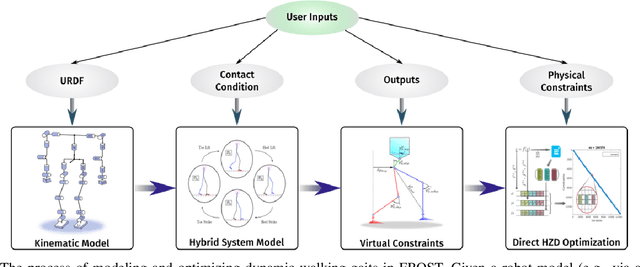
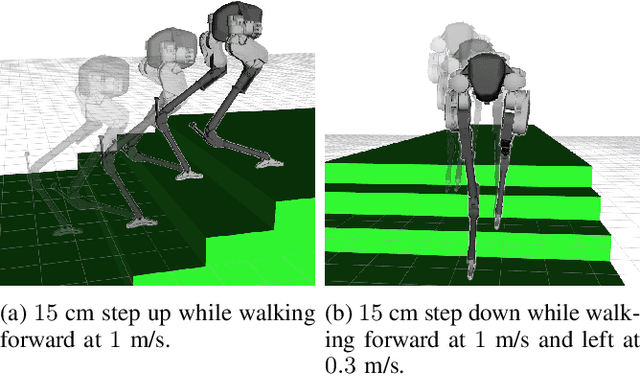
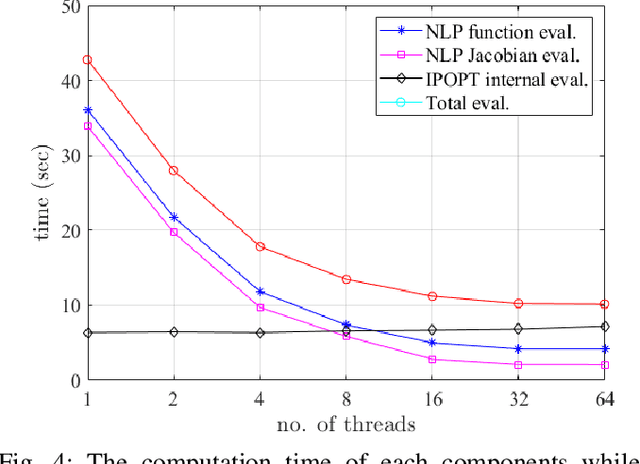
One of the big attractions of low-dimensional models for gait design has been the ability to compute solutions rapidly, whereas one of their drawbacks has been the difficulty in mapping the solutions back to the target robot. This paper presents a set of tools for rapidly determining solutions for ``humanoids'' without removing or lumping degrees of freedom. The main tools are (1) C-FROST, an open-source C++ interface for FROST, a direct collocation optimization tool; and (2) multi-threading. The results will be illustrated on a 20-DoF floating-base model for a Cassie-series bipedal robot through numerical calculations and physical experiments.
Feedback Control of a Cassie Bipedal Robot: Walking, Standing, and Riding a Segway
Sep 19, 2018
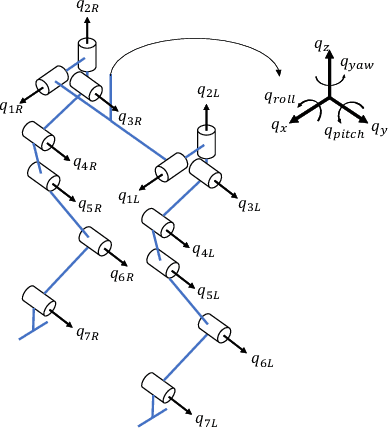
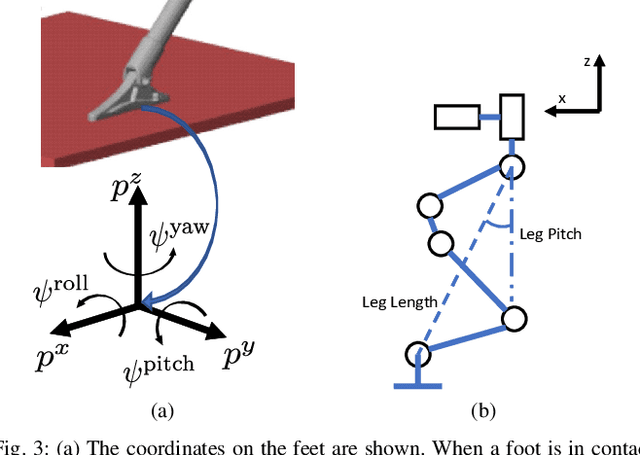
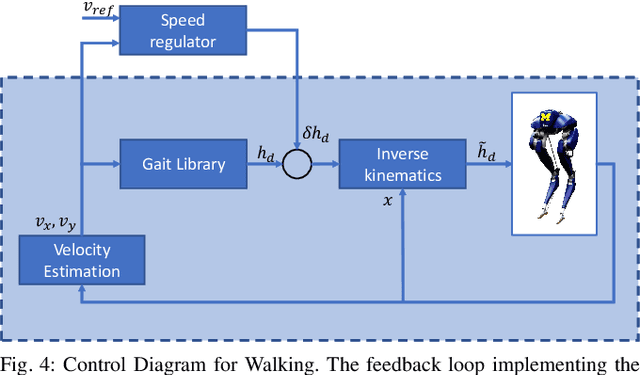
The Cassie bipedal robot designed by Agility Robotics is providing academics a common platform for sharing and comparing algorithms for locomotion, perception, and navigation. This paper focuses on feedback control for standing and walking using the methods of virtual constraints and gait libraries. The designed controller was implemented six weeks after the robot arrived at the University of Michigan and allowed it to stand in place as well as walk over sidewalks, grass, snow, sand, and burning brush. The controller for standing also enables the robot to ride a Segway. A model of the Cassie robot has been placed on GitHub and the controller will also be made open source if the paper is accepted.
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
May 21, 2018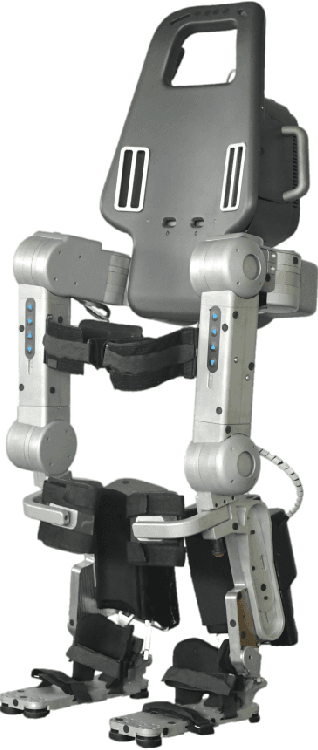
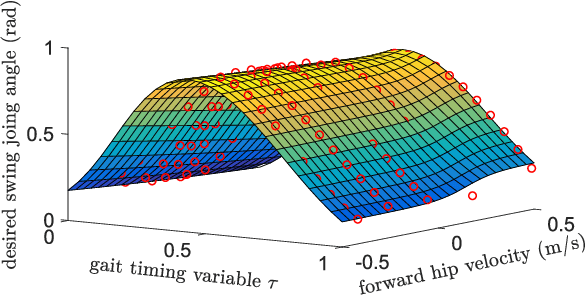
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the ability for the user to walk without the use of crutches or other external means of stabilization. We harness the power of modern optimization techniques and supervised machine learning to develop a smooth feedback control policy that provides robust velocity regulation and perturbation rejection. Preliminary evaluation of the stability and robustness of the proposed approach is demonstrated through the Gazebo simulation environment. In addition, preliminary experimental results with (complete) paraplegic individuals are included for the previous version of the controller.