 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStabilization of Exoskeletons through Active Ankle Compensation
Sep 26, 2019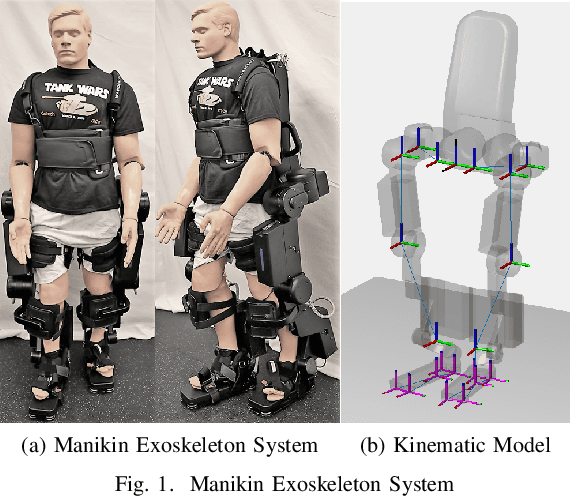
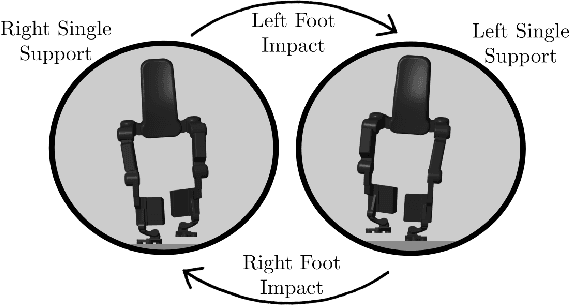
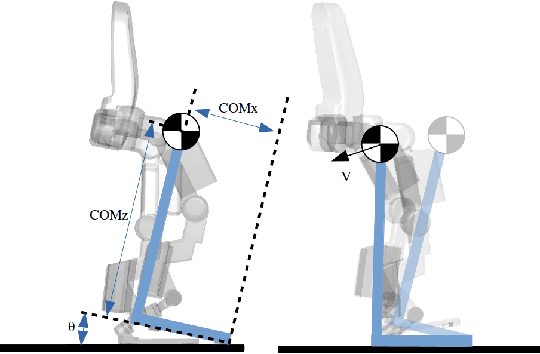
This paper presents an active stabilization method for a fully actuated lower-limb exoskeleton. The method was tested on the exoskeleton ATALANTE, which was designed and built by the French start-up company Wandercraft. The main objective of this paper is to present a practical method of realizing more robust walking on hardware through active ankle compensation. The nominal gait was generated through the hybrid zero dynamic framework. The ankles are individually controlled to establish three main directives; (1) keeping the non-stance foot parallel to the ground, (2) maintaining rigid contact between the stance foot and the ground, and (3) closing the loop on pelvis orientation to achieve better tracking. Each individual component of this method was demonstrated separately to show each component's contribution to stability. The results showed that the ankle controller was able to experimentally maintain static balance in the sagittal plane while the exoskeleton was balanced on one leg, even when disturbed. The entire ankle controller was then also demonstrated on crutch-less dynamic walking. During testing, an anatomically correct manikin was placed in the exoskeleton, in lieu of a paraplegic patient. The pitch of the pelvis of the exoskeleton-manikin system was shown to track the gait trajectory better when ankle compensation was used. Overall, active ankle compensation was demonstrated experimentally to improve balance in the sagittal plane of the exoskeleton manikin system and points to an improved practical approach for stable walking.
Towards Variable Assistance for Lower Body Exoskeletons
Sep 24, 2019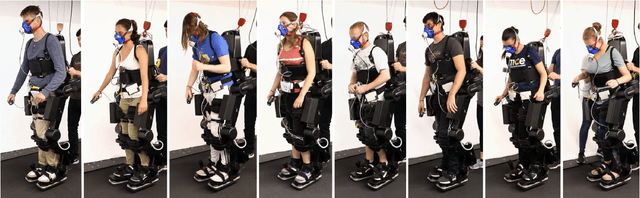
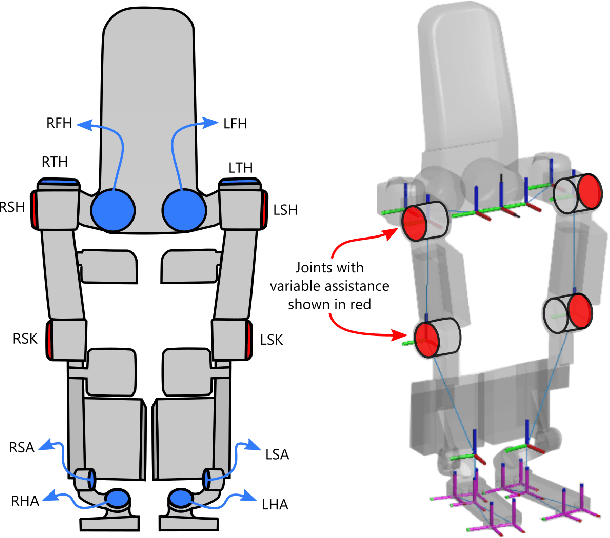

This paper presents and experimentally demonstrates a novel framework for variable assistance on lower body exoskeletons, based upon safety-critical control methods. Existing work has shown that providing some freedom of movement around a nominal gait, instead of rigidly following it, accelerates the spinal learning process of people with a walking impediment when using a lower body exoskeleton. With this as motivation, we present a method to accurately control how much a subject is allowed to deviate from a given gait while ensuring robustness to patient perturbation. This method leverages controlled set invariance tools to force certain joints to remain inside predefined trajectory tubes in a minimally invasive way. The effectiveness of the method is demonstrated experimentally with able-bodied subjects and the Atalante lower body exoskeleton.
Feedback Control of an Exoskeleton for Paraplegics: Toward Robustly Stable Hands-free Dynamic Walking
May 21, 2018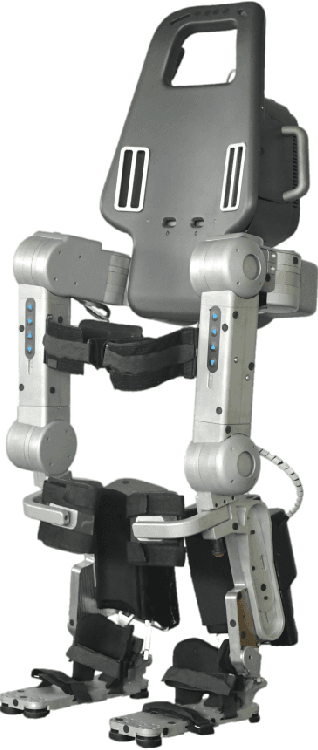
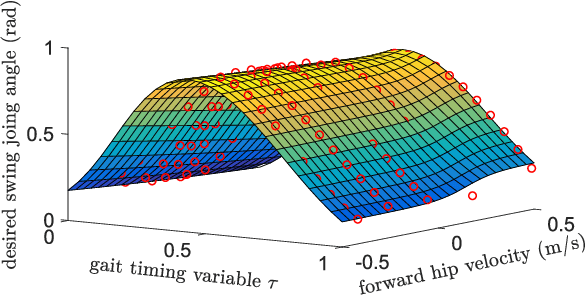
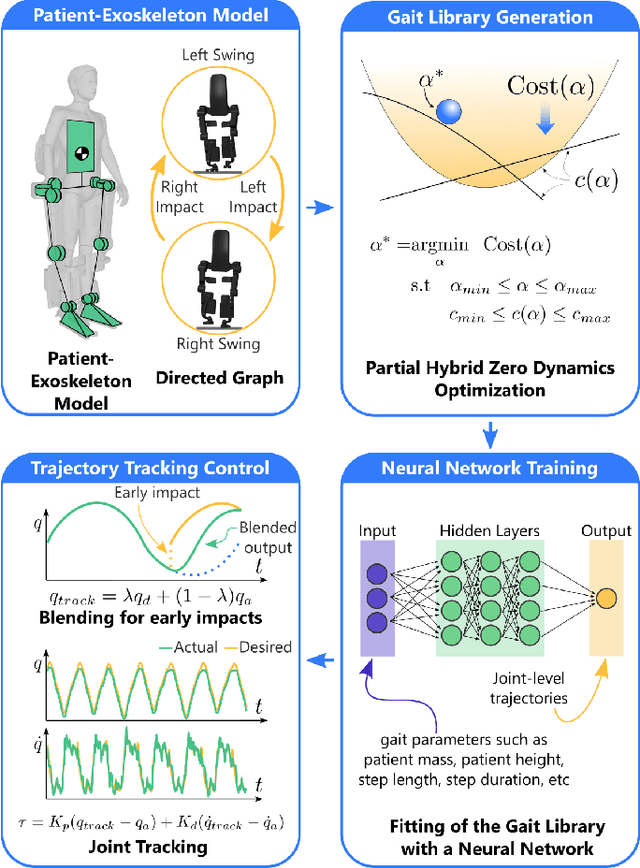
This manuscript presents control of a high-DOF fully actuated lower-limb exoskeleton for paraplegic individuals. The key novelty is the ability for the user to walk without the use of crutches or other external means of stabilization. We harness the power of modern optimization techniques and supervised machine learning to develop a smooth feedback control policy that provides robust velocity regulation and perturbation rejection. Preliminary evaluation of the stability and robustness of the proposed approach is demonstrated through the Gazebo simulation environment. In addition, preliminary experimental results with (complete) paraplegic individuals are included for the previous version of the controller.