 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Inverse Dynamics Approach to Control Lyapunov Functions
Oct 23, 2019
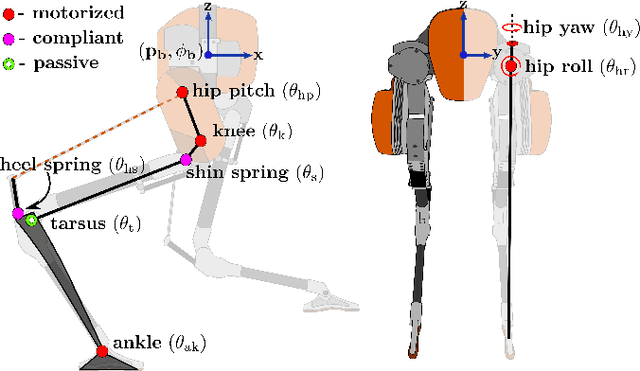
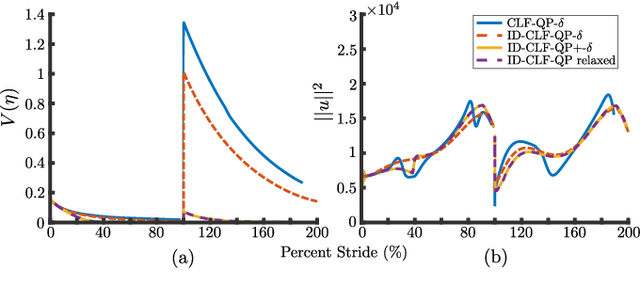
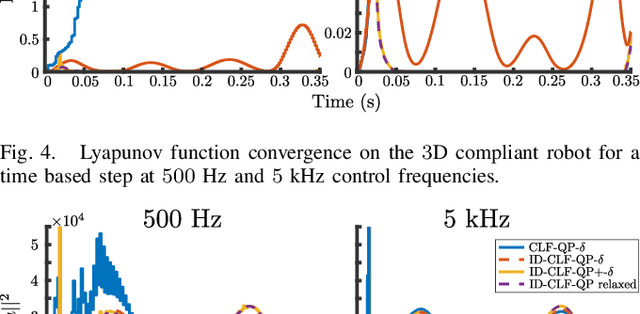
With the goal of moving towards implementation of increasingly dynamic behaviors on underactuated systems, this paper presents an optimization-based approach for solving full-body dynamics based controllers on underactuated bipedal robots. The primary focus of this paper is on the development of an alternative approach to the implementation of controllers utilizing control Lyapunov function based quadratic programs. This approach utilizes many of the desirable aspects from successful inverse dynamics based controllers in the literature, while also incorporating a variant of control Lyapunov functions that renders better convergence in the context of tracking outputs. The principal benefits of this formulation include a greater ability to add costs which regulate the resulting behavior of the robot, in addition, the model error-prone inertia matrix is used only once, in a non-inverted form. The result is a successful demonstration of the controller for walking in simulation, and applied on hardware in real-time for crouching.
Preference-Based Learning for Exoskeleton Gait Optimization
Sep 26, 2019

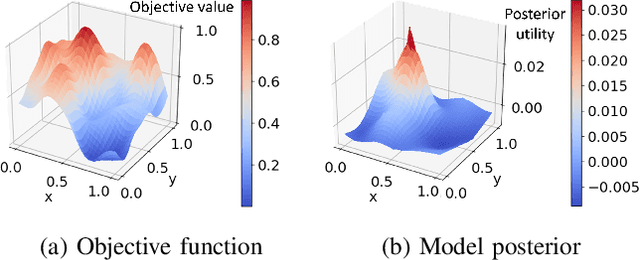
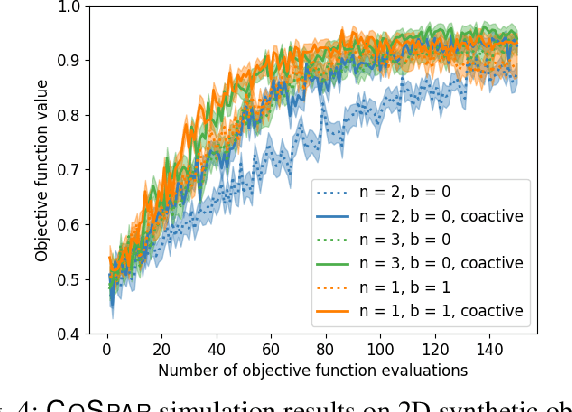
This paper presents a personalized gait optimization framework for lower-body exoskeletons. Rather than optimizing numerical objectives such as the mechanical cost of transport, our approach directly learns from user preferences, e.g., for comfort. Building upon work in preference-based interactive learning, we present the CoSpar algorithm. CoSpar prompts the user to give pairwise preferences between trials and suggest improvements; as exoskeleton walking is a non-intuitive behavior, users can provide preferences more easily and reliably than numerical feedback. We show that CoSpar performs competitively in simulation and demonstrate a prototype implementation of CoSpar on a lower-body exoskeleton to optimize human walking trajectory features. In the experiments, CoSpar consistently found user-preferred parameters of the exoskeleton's walking gait, which suggests that it is a promising starting point for adapting and personalizing exoskeletons (or other assistive devices) to individual users.
Stabilization of Exoskeletons through Active Ankle Compensation
Sep 26, 2019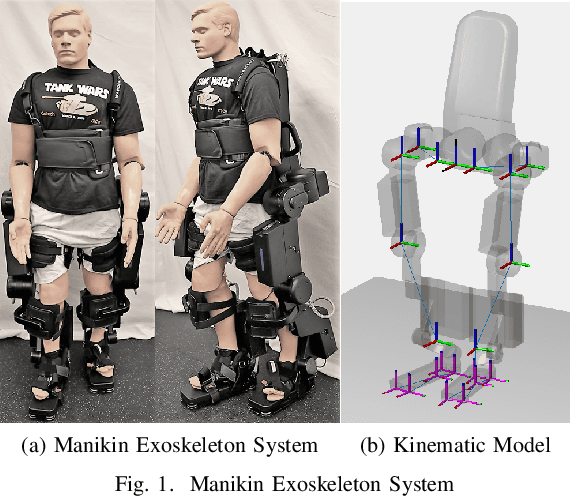
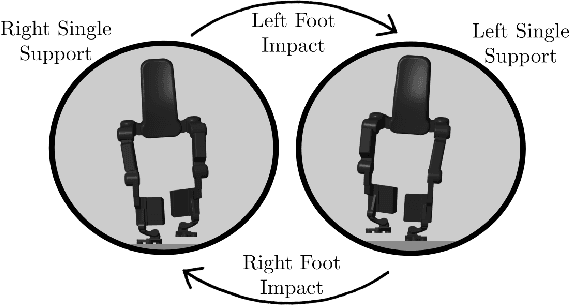
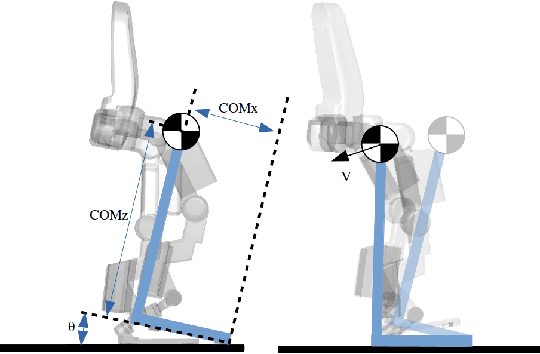
This paper presents an active stabilization method for a fully actuated lower-limb exoskeleton. The method was tested on the exoskeleton ATALANTE, which was designed and built by the French start-up company Wandercraft. The main objective of this paper is to present a practical method of realizing more robust walking on hardware through active ankle compensation. The nominal gait was generated through the hybrid zero dynamic framework. The ankles are individually controlled to establish three main directives; (1) keeping the non-stance foot parallel to the ground, (2) maintaining rigid contact between the stance foot and the ground, and (3) closing the loop on pelvis orientation to achieve better tracking. Each individual component of this method was demonstrated separately to show each component's contribution to stability. The results showed that the ankle controller was able to experimentally maintain static balance in the sagittal plane while the exoskeleton was balanced on one leg, even when disturbed. The entire ankle controller was then also demonstrated on crutch-less dynamic walking. During testing, an anatomically correct manikin was placed in the exoskeleton, in lieu of a paraplegic patient. The pitch of the pelvis of the exoskeleton-manikin system was shown to track the gait trajectory better when ankle compensation was used. Overall, active ankle compensation was demonstrated experimentally to improve balance in the sagittal plane of the exoskeleton manikin system and points to an improved practical approach for stable walking.