 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStow: Robotic Packing of Items into Fabric Pods
May 07, 2025



This paper presents a compliant manipulation system capable of placing items onto densely packed shelves. The wide diversity of items and strict business requirements for high producing rates and low defect generation have prohibited warehouse robotics from performing this task. Our innovations in hardware, perception, decision-making, motion planning, and control have enabled this system to perform over 500,000 stows in a large e-commerce fulfillment center. The system achieves human levels of packing density and speed while prioritizing work on overhead shelves to enhance the safety of humans working alongside the robots.
Learning Critical Regions for Robot Planning using Convolutional Neural Networks
Apr 15, 2019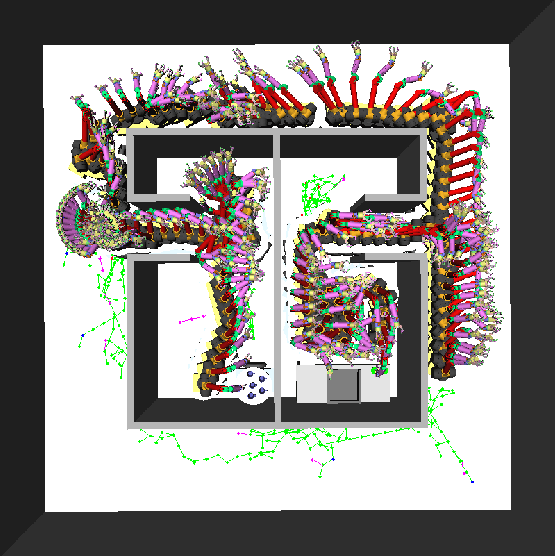
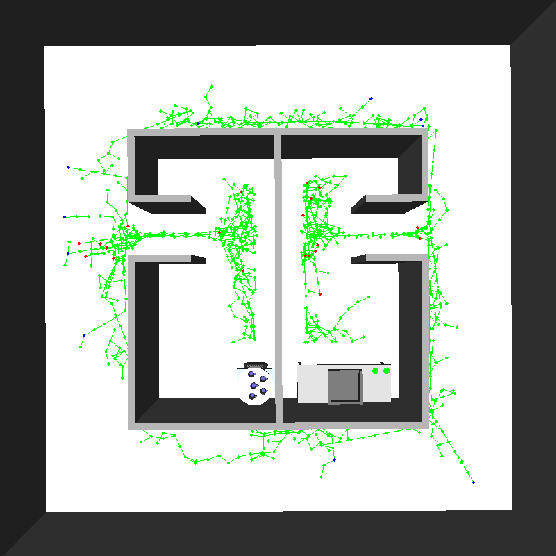
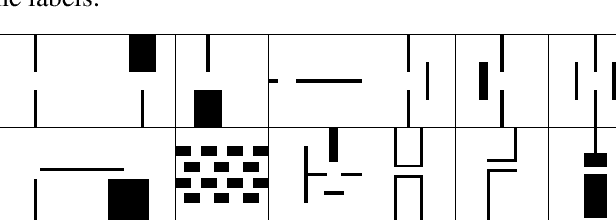
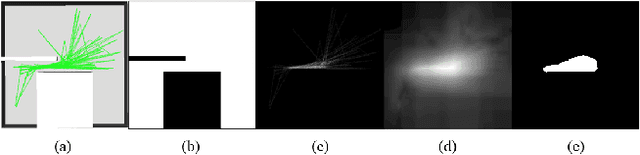
In this paper, we present a new approach to learning for motion planning (MP) where critical regions of an environment with low probability measure are learned from a given set of motion plans and used to improve performance on new problem instances. We show that convolutional neural networks (CNN) can be used to identify critical regions for motion planning problems. We also introduce a new sampling-based motion planner, Learn and Link. Our planner leverages critical region locations identified by our CNN to overcome the limitations of uniform sampling, while still maintaining guarantees of correctness inherent to sampling-based algorithms. We evaluate Learn and Link against planners from the Open Motion Planning Library (OMPL) using an extensive suite of experiments on challenging navigation planning problems. We show that our approach requires far less planning time than the existing sampling-based planners.