 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHTN Plan Repair Algorithms Compared: Strengths and Weaknesses of Different Methods
Apr 22, 2025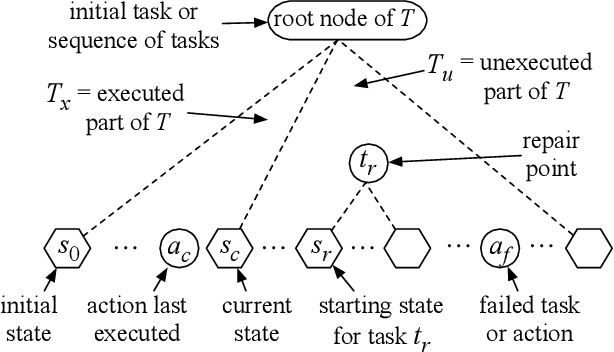
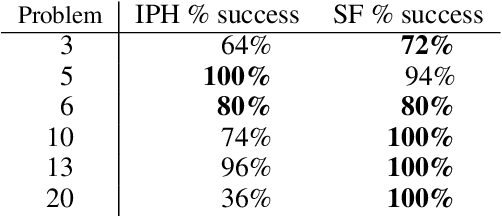
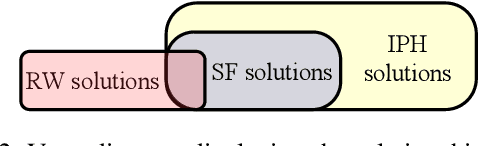
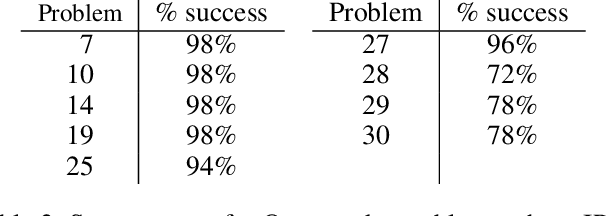
This paper provides theoretical and empirical comparisons of three recent hierarchical plan repair algorithms: SHOPFixer, IPyHOPPER, and Rewrite. Our theoretical results show that the three algorithms correspond to three different definitions of the plan repair problem, leading to differences in the algorithms' search spaces, the repair problems they can solve, and the kinds of repairs they can make. Understanding these distinctions is important when choosing a repair method for any given application. Building on the theoretical results, we evaluate the algorithms empirically in a series of benchmark planning problems. Our empirical results provide more detailed insight into the runtime repair performance of these systems and the coverage of the repair problems solved, based on algorithmic properties such as replanning, chronological backtracking, and backjumping over plan trees.
Bottom-Up and Top-Down Analysis of Values, Agendas, and Observations in Corpora and LLMs
Nov 06, 2024Large language models (LLMs) generate diverse, situated, persuasive texts from a plurality of potential perspectives, influenced heavily by their prompts and training data. As part of LLM adoption, we seek to characterize - and ideally, manage - the socio-cultural values that they express, for reasons of safety, accuracy, inclusion, and cultural fidelity. We present a validated approach to automatically (1) extracting heterogeneous latent value propositions from texts, (2) assessing resonance and conflict of values with texts, and (3) combining these operations to characterize the pluralistic value alignment of human-sourced and LLM-sourced textual data.
Provenance-Based Assessment of Plans in Context
Nov 03, 2020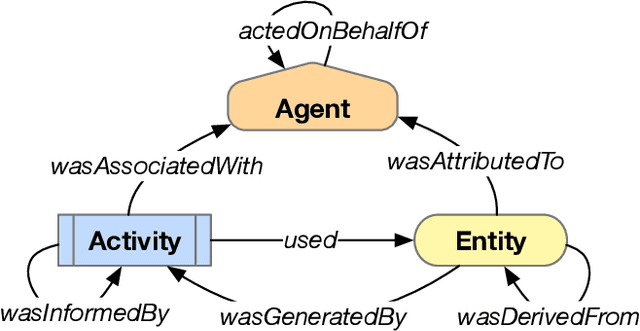
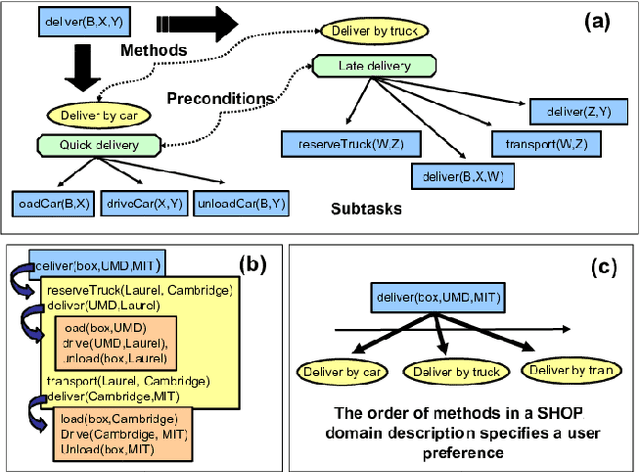
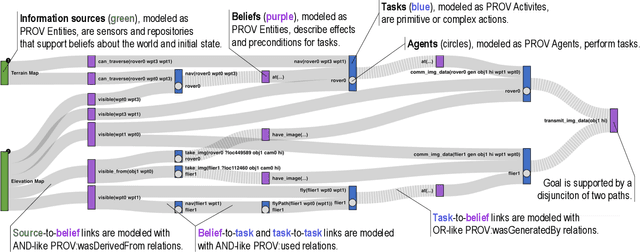
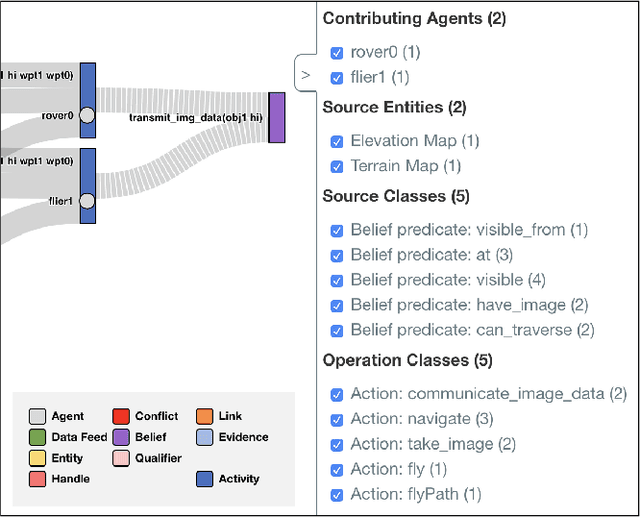
Many real-world planning domains involve diverse information sources, external entities, and variable-reliability agents, all of which may impact the confidence, risk, and sensitivity of plans. Humans reviewing a plan may lack context about these factors; however, this information is available during the domain generation, which means it can also be interwoven into the planner and its resulting plans. This paper presents a provenance-based approach to explaining automated plans. Our approach (1) extends the SHOP3 HTN planner to generate dependency information, (2) transforms the dependency information into an established PROV-O representation, and (3) uses graph propagation and TMS-inspired algorithms to support dynamic and counter-factual assessment of information flow, confidence, and support. We qualified our approach's explanatory scope with respect to explanation targets from the automated planning literature and the information analysis literature, and we demonstrate its ability to assess a plan's pertinence, sensitivity, risk, assumption support, diversity, and relative confidence.
* 9 pages, 7 figures, including in Proceedings of the 2020 ICAPS Workshop on Explainable AI Planning (XAIP)
Plan Recognition in Stories and in Life
Mar 27, 2013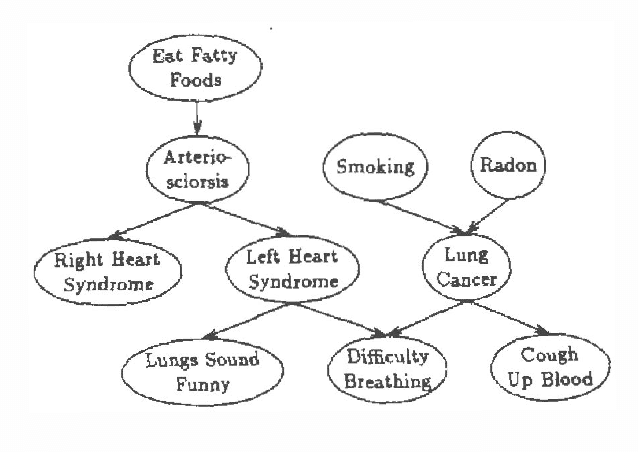
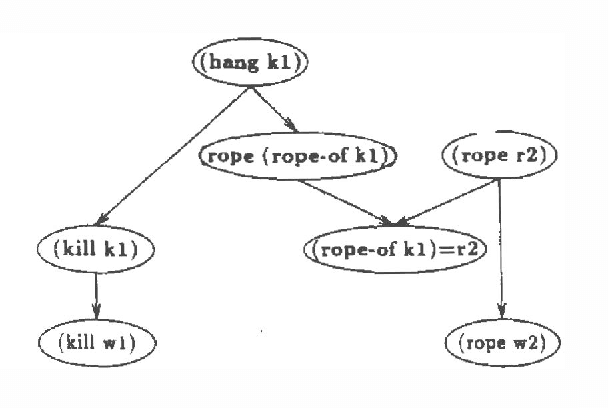
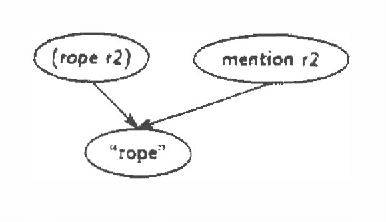
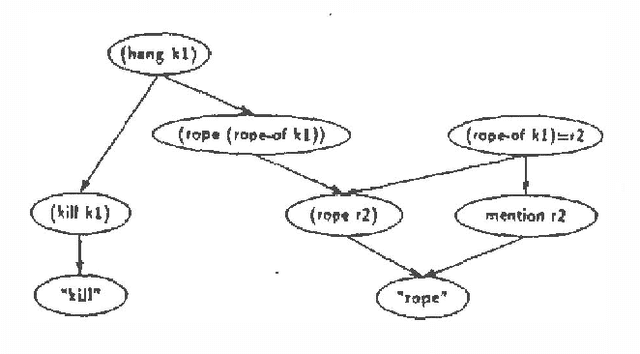
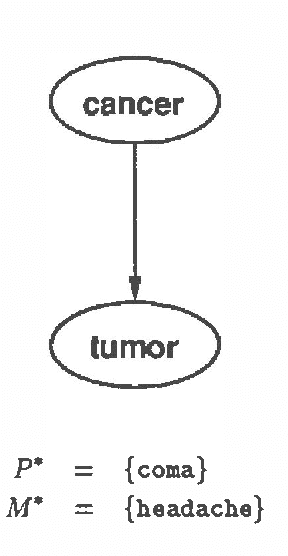
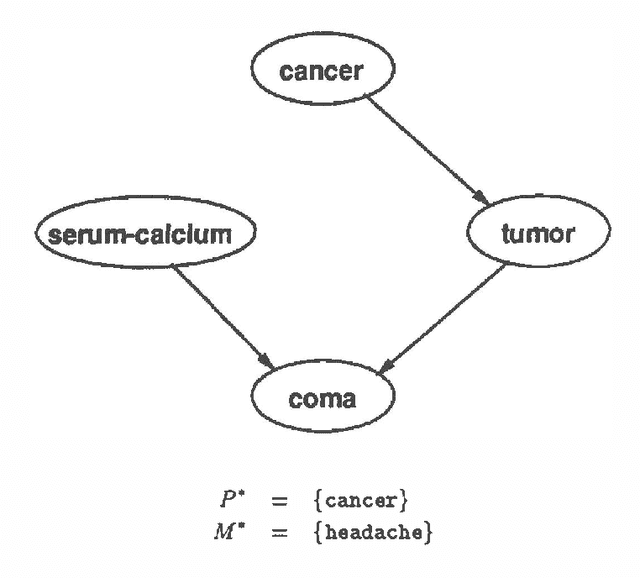
Plan recognition does not work the same way in stories and in "real life" (people tend to jump to conclusions more in stories). We present a theory of this, for the particular case of how objects in stories (or in life) influence plan recognition decisions. We provide a Bayesian network formalization of a simple first-order theory of plans, and show how a particular network parameter seems to govern the difference between "life-like" and "story-like" response. We then show why this parameter would be influenced (in the desired way) by a model of speaker (or author) topic selection which assumes that facts in stories are typically "relevant".
Dynamic Construction of Belief Networks
Mar 27, 2013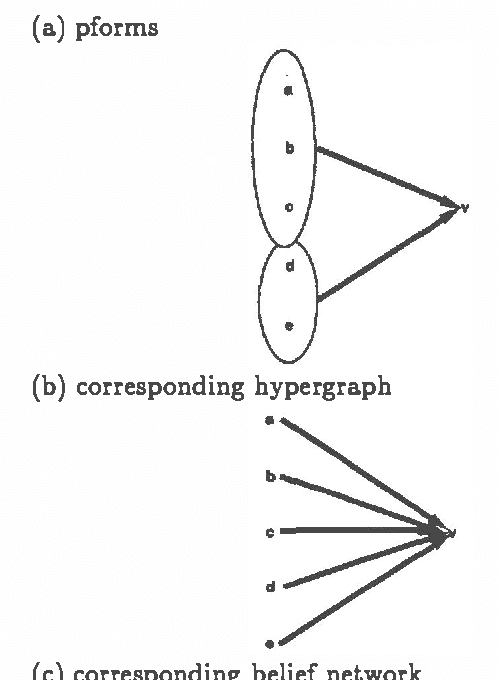
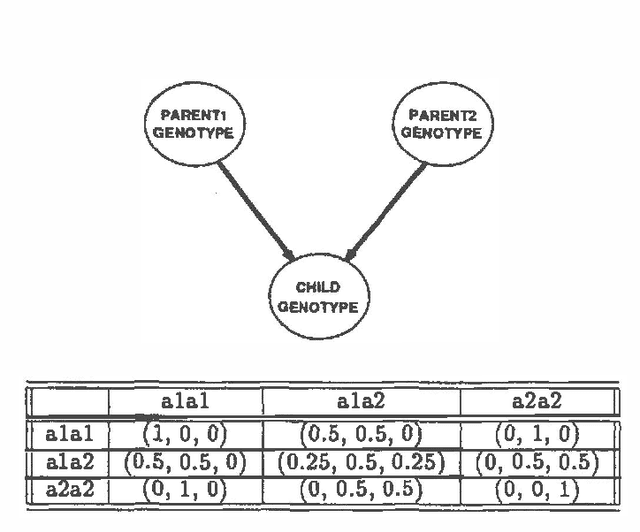
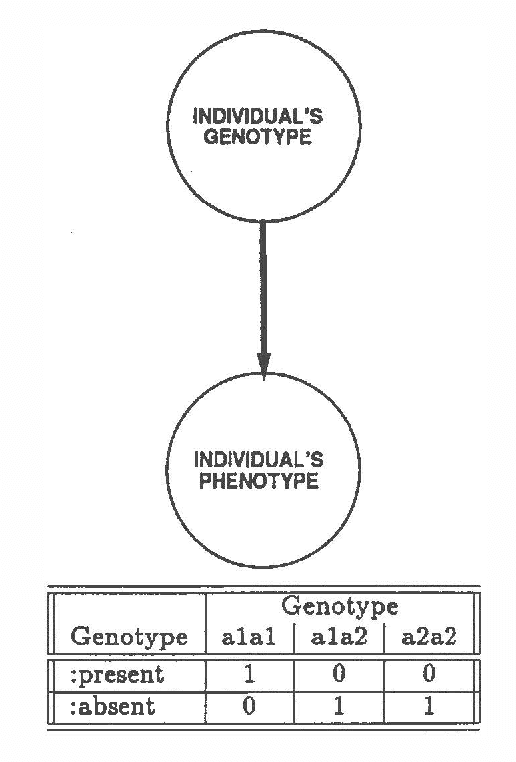
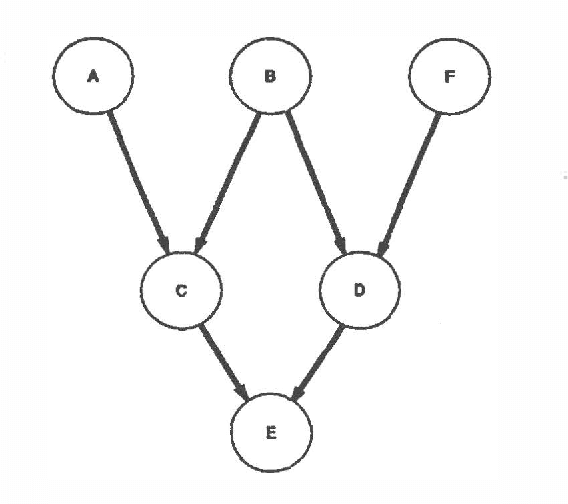
We describe a method for incrementally constructing belief networks. We have developed a network-construction language similar to a forward-chaining language using data dependencies, but with additional features for specifying distributions. Using this language, we can define parameterized classes of probabilistic models. These parameterized models make it possible to apply probabilistic reasoning to problems for which it is impractical to have a single large static model.
Integrating Model Construction and Evaluation
Mar 13, 2013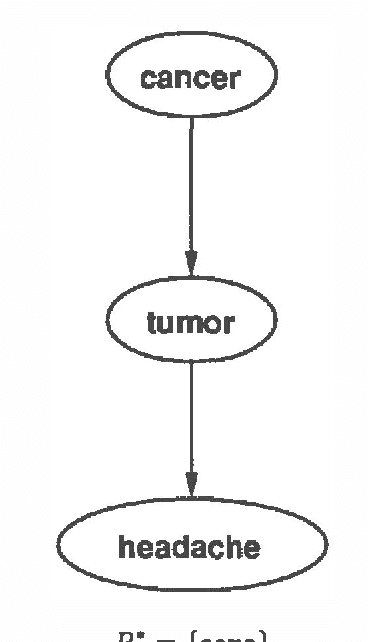
To date, most probabilistic reasoning systems have relied on a fixed belief network constructed at design time. The network is used by an application program as a representation of (in)dependencies in the domain. Probabilistic inference algorithms operate over the network to answer queries. Recognizing the inflexibility of fixed models has led researchers to develop automated network construction procedures that use an expressive knowledge base to generate a network that can answer a query. Although more flexible than fixed model approaches, these construction procedures separate construction and evaluation into distinct phases. In this paper we develop an approach to combining incremental construction and evaluation of a partial probability model. The combined method holds promise for improved methods for control of model construction based on a trade-off between fidelity of results and cost of construction.
Epsilon-Safe Planning
Feb 27, 2013

We introduce an approach to high-level conditional planning we call epsilon-safe planning. This probabilistic approach commits us to planning to meet some specified goal with a probability of success of at least 1-epsilon for some user-supplied epsilon. We describe several algorithms for epsilon-safe planning based on conditional planners. The two conditional planners we discuss are Peot and Smith's nonlinear conditional planner, CNLP, and our own linear conditional planner, PLINTH. We present a straightforward extension to conditional planners for which computing the necessary probabilities is simple, employing a commonly-made but perhaps overly-strong independence assumption. We also discuss a second approach to epsilon-safe planning which relaxes this independence assumption, involving the incremental construction of a probability dependence model in conjunction with the construction of the plan graph.
A New Model of Plan Recognition
Jan 23, 2013

We present a new abductive, probabilistic theory of plan recognition. This model differs from previous plan recognition theories in being centered around a model of plan execution: most previous methods have been based on plans as formal objects or on rules describing the recognition process. We show that our new model accounts for phenomena omitted from most previous plan recognition theories: notably the cumulative effect of a sequence of observations of partially-ordered, interleaved plans and the effect of context on plan adoption. The model also supports inferences about the evolution of plan execution in situations where another agent intervenes in plan execution. This facility provides support for using plan recognition to build systems that will intelligently assist a user.