 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructured Reachability Analysis for Markov Decision Processes
Apr 23, 2013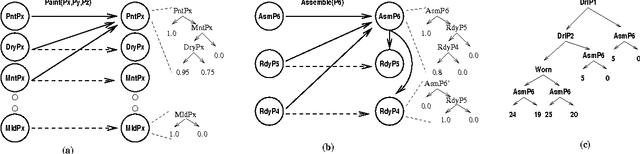

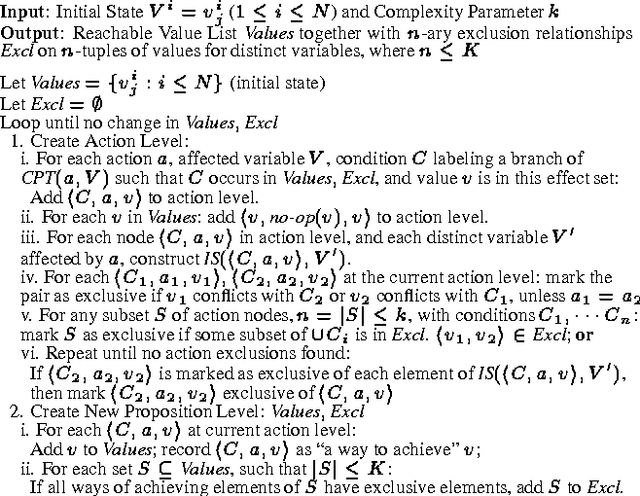
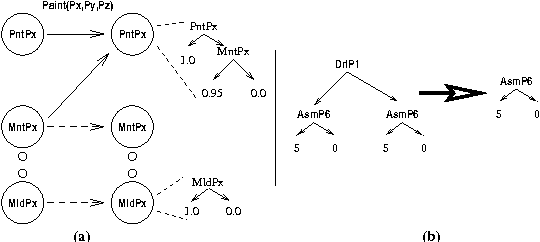
Recent research in decision theoretic planning has focussed on making the solution of Markov decision processes (MDPs) more feasible. We develop a family of algorithms for structured reachability analysis of MDPs that are suitable when an initial state (or set of states) is known. Using compact, structured representations of MDPs (e.g., Bayesian networks), our methods, which vary in the tradeoff between complexity and accuracy, produce structured descriptions of (estimated) reachable states that can be used to eliminate variables or variable values from the problem description, reducing the size of the MDP and making it easier to solve. One contribution of our work is the extension of ideas from GRAPHPLAN to deal with the distributed nature of action representations typically embodied within Bayes nets and the problem of correlated action effects. We also demonstrate that our algorithm can be made more complete by using k-ary constraints instead of binary constraints. Another contribution is the illustration of how the compact representation of reachability constraints can be exploited by several existing (exact and approximate) abstraction algorithms for MDPs.
A New Model of Plan Recognition
Jan 23, 2013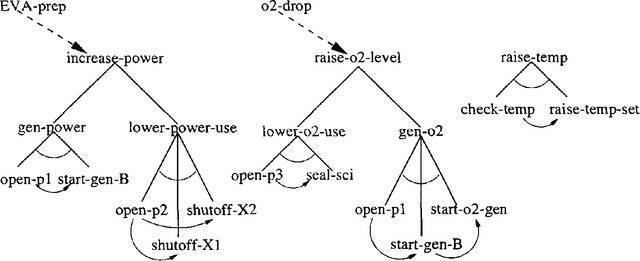

We present a new abductive, probabilistic theory of plan recognition. This model differs from previous plan recognition theories in being centered around a model of plan execution: most previous methods have been based on plans as formal objects or on rules describing the recognition process. We show that our new model accounts for phenomena omitted from most previous plan recognition theories: notably the cumulative effect of a sequence of observations of partially-ordered, interleaved plans and the effect of context on plan adoption. The model also supports inferences about the evolution of plan execution in situations where another agent intervenes in plan execution. This facility provides support for using plan recognition to build systems that will intelligently assist a user.