 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Model of Plan Recognition
Paper and Code
Jan 23, 2013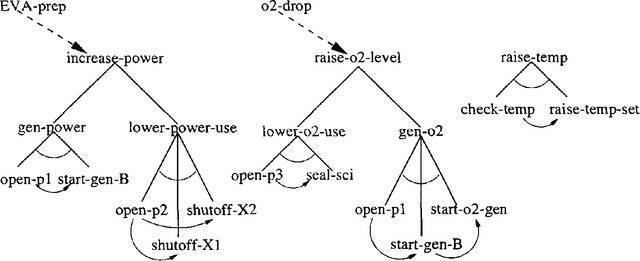

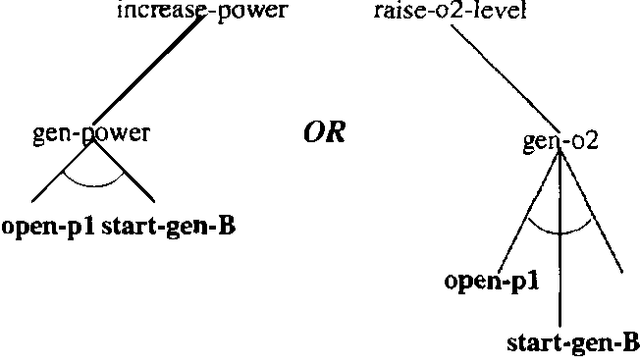
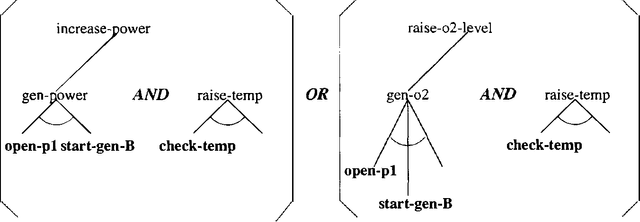
We present a new abductive, probabilistic theory of plan recognition. This model differs from previous plan recognition theories in being centered around a model of plan execution: most previous methods have been based on plans as formal objects or on rules describing the recognition process. We show that our new model accounts for phenomena omitted from most previous plan recognition theories: notably the cumulative effect of a sequence of observations of partially-ordered, interleaved plans and the effect of context on plan adoption. The model also supports inferences about the evolution of plan execution in situations where another agent intervenes in plan execution. This facility provides support for using plan recognition to build systems that will intelligently assist a user.