 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning-assisted autonomous swarm shepherding with collision avoidance
Jan 25, 2023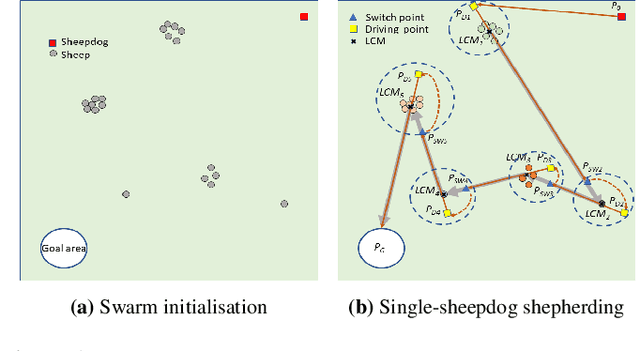
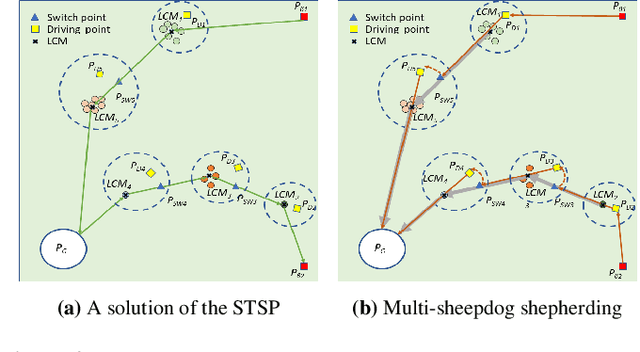
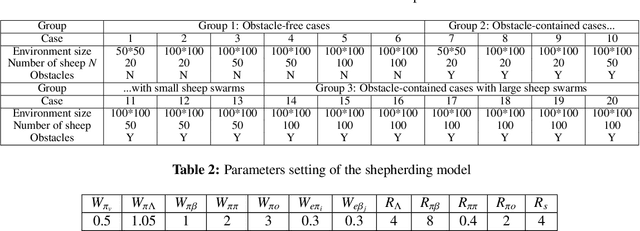
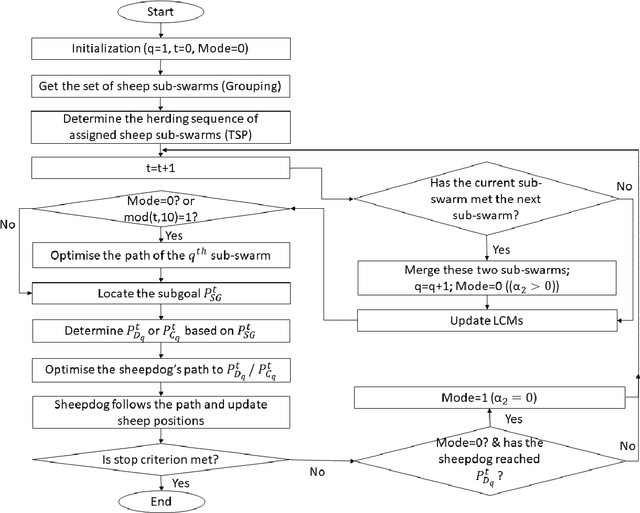
Robotic shepherding is a bio-inspired approach to autonomously guiding a swarm of agents towards a desired location and has earned increasing research interest recently. However, shepherding a highly dispersed swarm in an obstructive environment remains challenging for the existing methods. To improve the shepherding efficacy in complex environments with obstacles and dispersed sheep, this paper proposes a planning-assisted autonomous shepherding framework with collision avoidance. The proposed approach transforms the swarm shepherding problem into a single Travelling Salesman Problem (TSP), with the sheepdog moving mode classified into non-interaction and interaction mode. Additionally, an adaptive switching approach is integrated into the framework to guide real-time path planning for avoiding collisions with obstacles and sometimes with sheep swarm. Then the overarching hierarchical mission planning system is presented, which consists of a grouping approach to obtain sheep sub-swarms, a general TSP solver for determining the optimal push sequence of sub-swarms, and an online path planner for calculating optimal paths for both sheepdogs and sheep. The experiments on a range of environments, both with and without obstacles, quantitatively demonstrate the effectiveness of the proposed shepherding framework and planning approaches.
Path Planning for Shepherding a Swarm in a Cluttered Environment using Differential Evolution
Aug 28, 2020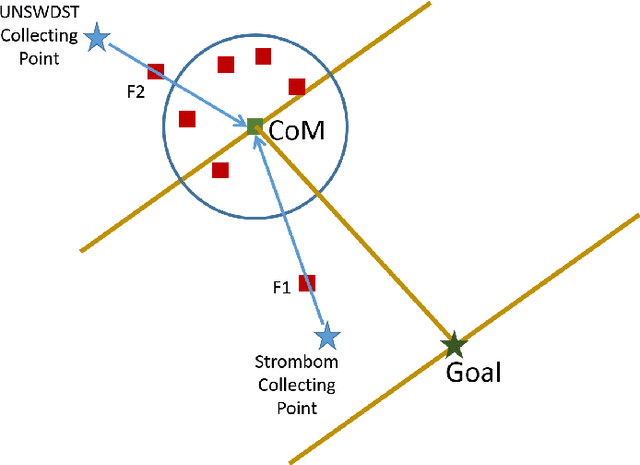
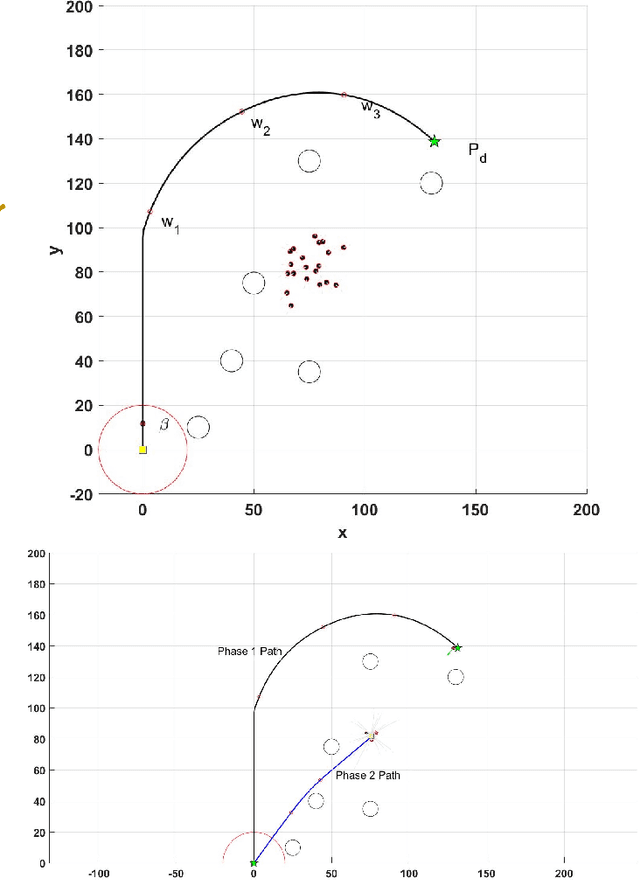
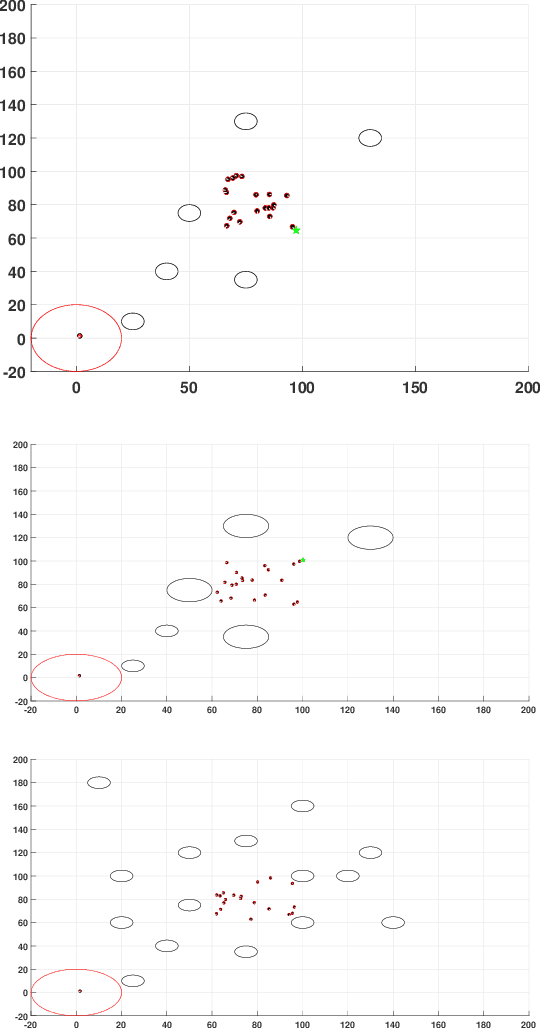
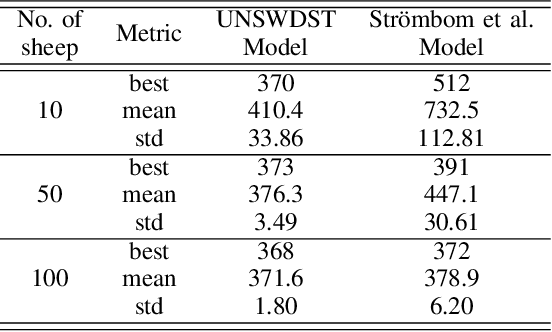
Shepherding involves herding a swarm of agents (\emph{sheep}) by another a control agent (\emph{sheepdog}) towards a goal. Multiple approaches have been documented in the literature to model this behaviour. In this paper, we present a modification to a well-known shepherding approach, and show, via simulation, that this modification improves shepherding efficacy. We then argue that given complexity arising from obstacles laden environments, path planning approaches could further enhance this model. To validate this hypothesis, we present a 2-stage evolutionary-based path planning algorithm for shepherding a swarm of agents in 2D environments. In the first stage, the algorithm attempts to find the best path for the sheepdog to move from its initial location to a strategic driving location behind the sheep. In the second stage, it calculates and optimises a path for the sheep. It does so by using \emph{way points} on that path as the sequential sub-goals for the sheepdog to aim towards. The proposed algorithm is evaluated in obstacle laden environments via simulation with further improvements achieved.
Machine Education: Designing semantically ordered and ontologically guided modular neural networks
Feb 07, 2020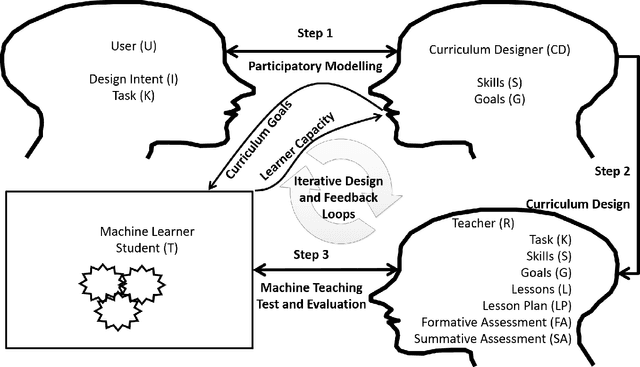
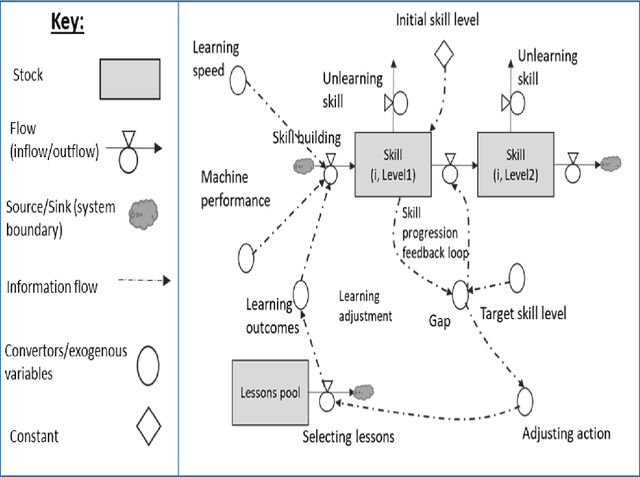
The literature on machine teaching, machine education, and curriculum design for machines is in its infancy with sparse papers on the topic primarily focusing on data and model engineering factors to improve machine learning. In this paper, we first discuss selected attempts to date on machine teaching and education. We then bring theories and methodologies together from human education to structure and mathematically define the core problems in lesson design for machine education and the modelling approaches required to support the steps for machine education. Last, but not least, we offer an ontology-based methodology to guide the development of lesson plans to produce transparent and explainable modular learning machines, including neural networks.
Robotic Hierarchical Graph Neurons. A novel implementation of HGN for swarm robotic behaviour control
Oct 28, 2019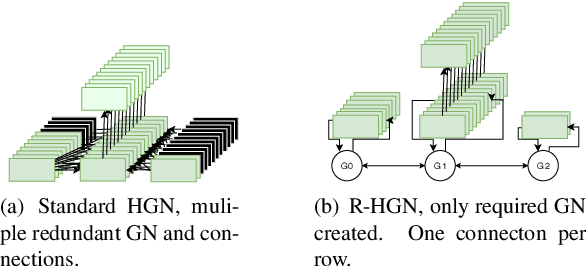
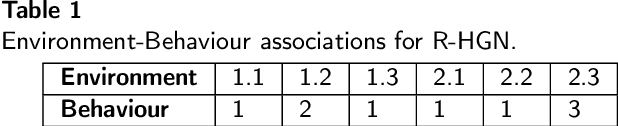

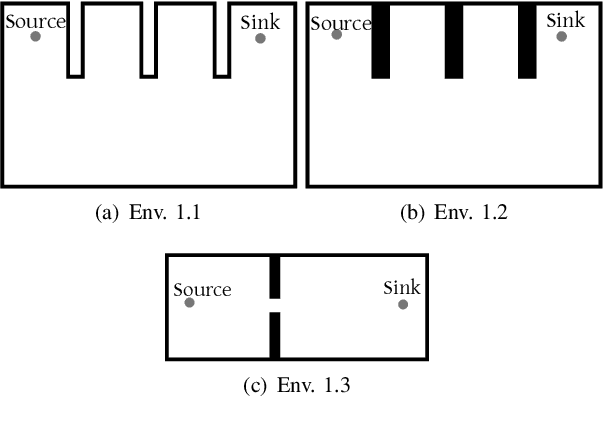
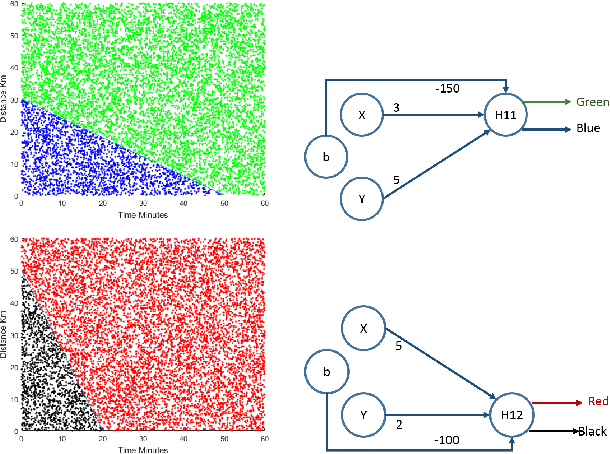
This paper explores the use of a novel form of Hierarchical Graph Neurons (HGN) for in-operation behaviour selection in a swarm of robotic agents. This new HGN is called Robotic-HGN (R-HGN), as it matches robot environment observations to environment labels via fusion of match probabilities from both temporal and intra-swarm collections. This approach is novel for HGN as it addresses robotic observations being pseudo-continuous numbers, rather than categorical values. Additionally, the proposed approach is memory and computation-power conservative and thus is acceptable for use in mobile devices such as single-board computers, which are often used in mobile robotic agents. This R-HGN approach is validated against individual behaviour implementation and random behaviour selection. This contrast is made in two sets of simulated environments: environments designed to challenge the held behaviours of the R-HGN, and randomly generated environments which are more challenging for the robotic swarm than R-HGN training conditions. R-HGN has been found to enable appropriate behaviour selection in both these sets, allowing significant swarm performance in pre-trained and unexpected environment conditions.
Swarm Behaviour Evolution via Rule Sharing and Novelty Search
Oct 28, 2019



We present in this paper an exertion of our previous work by increasing the robustness and coverage of the evolution search via hybridisation with a state-of-the-art novelty search and accelerate the individual agent behaviour searches via a novel behaviour-component sharing technique. Via these improvements, we present Swarm Learning Classifier System 2.0 (SLCS2), a behaviour evolving algorithm which is robust to complex environments, and seen to out-perform a human behaviour designer in challenging cases of the data-transfer task in a range of environmental conditions. Additionally, we examine the impact of tailoring the SLCS2 rule generator for specific environmental conditions. We find this leads to over-fitting, as might be expected, and thus conclude that for greatest environment flexibility a general rule generator should be utilised.