 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning for Shepherding a Swarm in a Cluttered Environment using Differential Evolution
Aug 28, 2020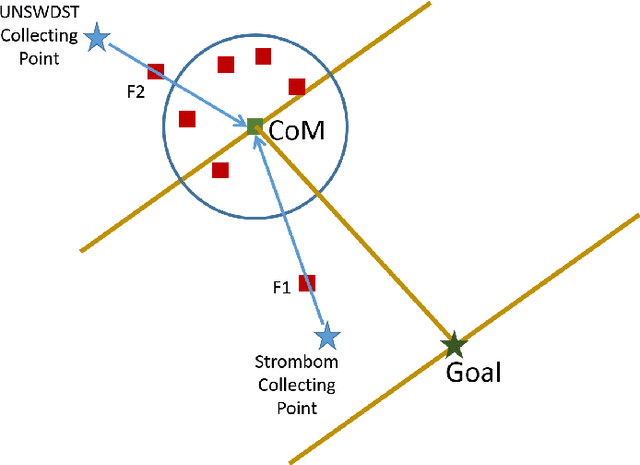
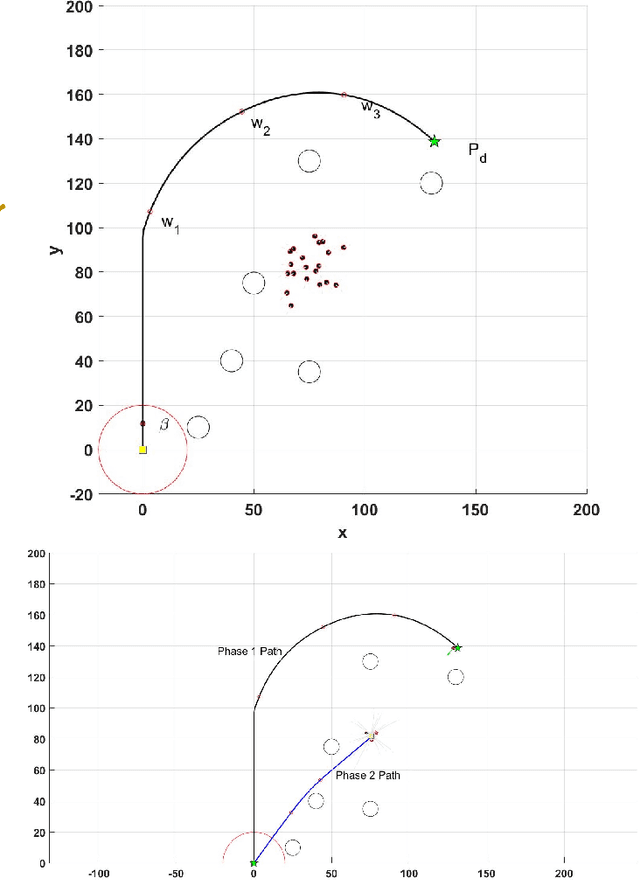
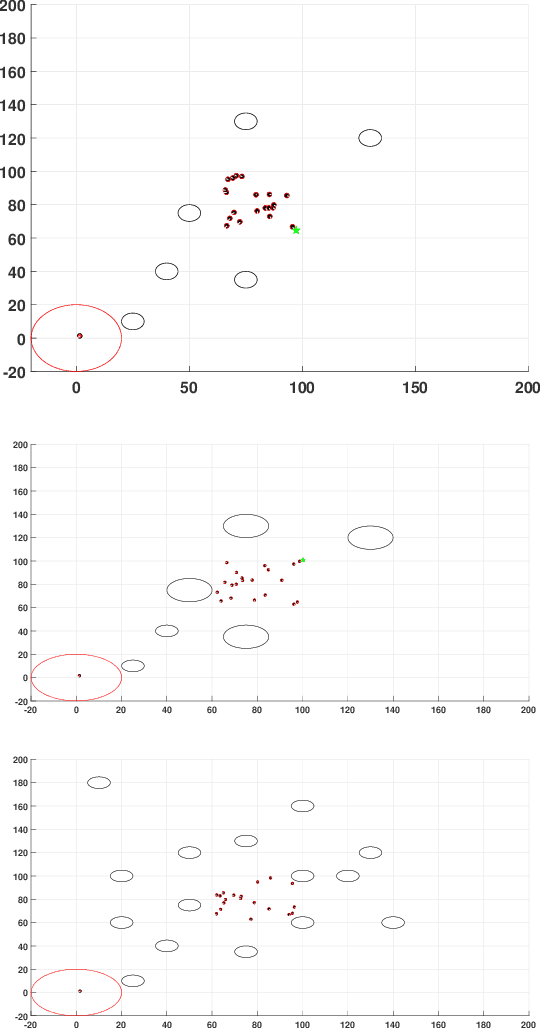
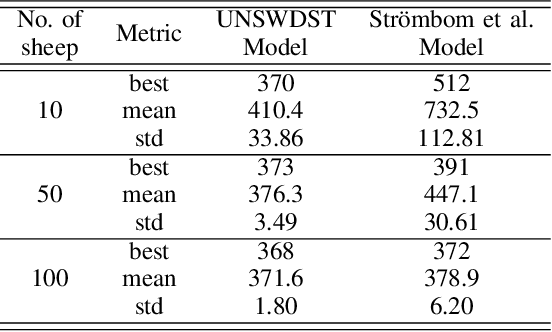
Shepherding involves herding a swarm of agents (\emph{sheep}) by another a control agent (\emph{sheepdog}) towards a goal. Multiple approaches have been documented in the literature to model this behaviour. In this paper, we present a modification to a well-known shepherding approach, and show, via simulation, that this modification improves shepherding efficacy. We then argue that given complexity arising from obstacles laden environments, path planning approaches could further enhance this model. To validate this hypothesis, we present a 2-stage evolutionary-based path planning algorithm for shepherding a swarm of agents in 2D environments. In the first stage, the algorithm attempts to find the best path for the sheepdog to move from its initial location to a strategic driving location behind the sheep. In the second stage, it calculates and optimises a path for the sheep. It does so by using \emph{way points} on that path as the sequential sub-goals for the sheepdog to aim towards. The proposed algorithm is evaluated in obstacle laden environments via simulation with further improvements achieved.