 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Mitigating ChatGPT's Negative Impact on Education: Optimizing Question Design through Bloom's Taxonomy
Mar 31, 2023The popularity of generative text AI tools in answering questions has led to concerns regarding their potential negative impact on students' academic performance and the challenges that educators face in evaluating student learning. To address these concerns, this paper introduces an evolutionary approach that aims to identify the best set of Bloom's taxonomy keywords to generate questions that these tools have low confidence in answering. The effectiveness of this approach is evaluated through a case study that uses questions from a Data Structures and Representation course being taught at the University of New South Wales in Canberra, Australia. The results demonstrate that the optimization algorithm is able to find keywords from different cognitive levels to create questions that ChatGPT has low confidence in answering. This study is a step forward to offer valuable insights for educators seeking to create more effective questions that promote critical thinking among students.
Planning-assisted autonomous swarm shepherding with collision avoidance
Jan 25, 2023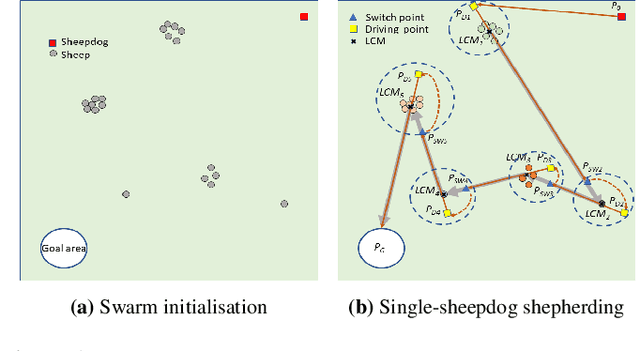
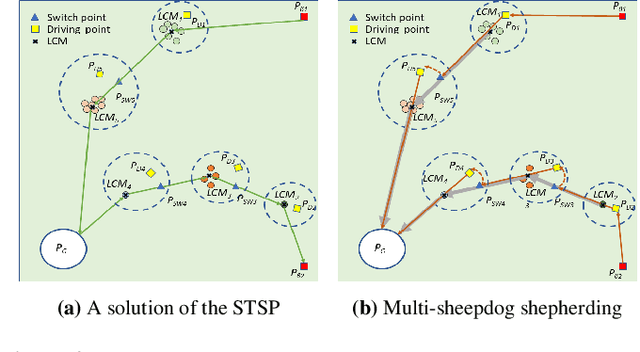
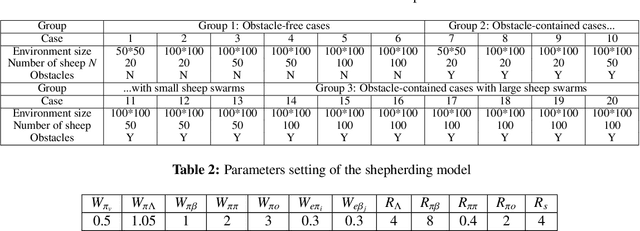
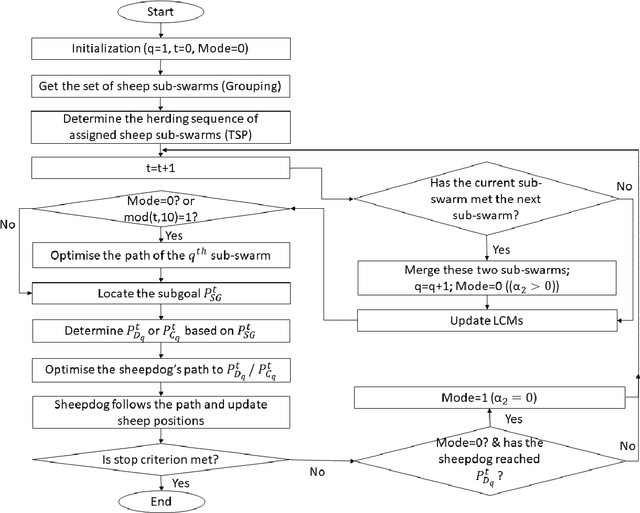
Robotic shepherding is a bio-inspired approach to autonomously guiding a swarm of agents towards a desired location and has earned increasing research interest recently. However, shepherding a highly dispersed swarm in an obstructive environment remains challenging for the existing methods. To improve the shepherding efficacy in complex environments with obstacles and dispersed sheep, this paper proposes a planning-assisted autonomous shepherding framework with collision avoidance. The proposed approach transforms the swarm shepherding problem into a single Travelling Salesman Problem (TSP), with the sheepdog moving mode classified into non-interaction and interaction mode. Additionally, an adaptive switching approach is integrated into the framework to guide real-time path planning for avoiding collisions with obstacles and sometimes with sheep swarm. Then the overarching hierarchical mission planning system is presented, which consists of a grouping approach to obtain sheep sub-swarms, a general TSP solver for determining the optimal push sequence of sub-swarms, and an online path planner for calculating optimal paths for both sheepdogs and sheep. The experiments on a range of environments, both with and without obstacles, quantitatively demonstrate the effectiveness of the proposed shepherding framework and planning approaches.
Path Planning for Shepherding a Swarm in a Cluttered Environment using Differential Evolution
Aug 28, 2020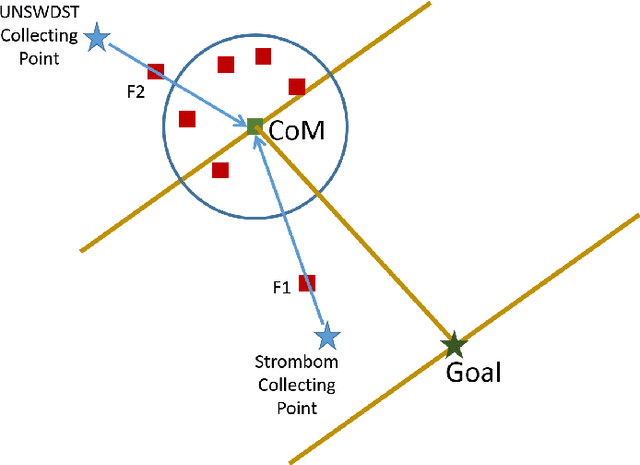
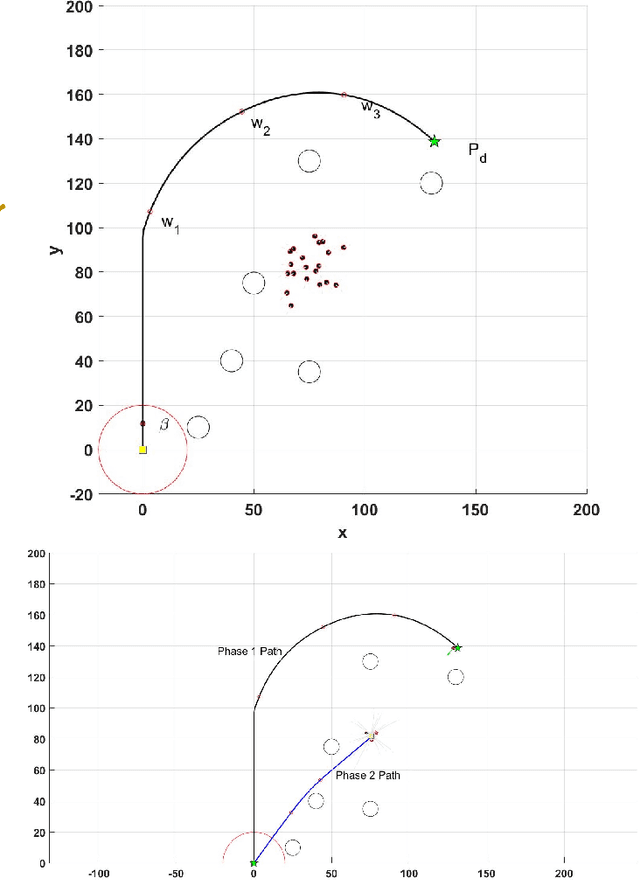
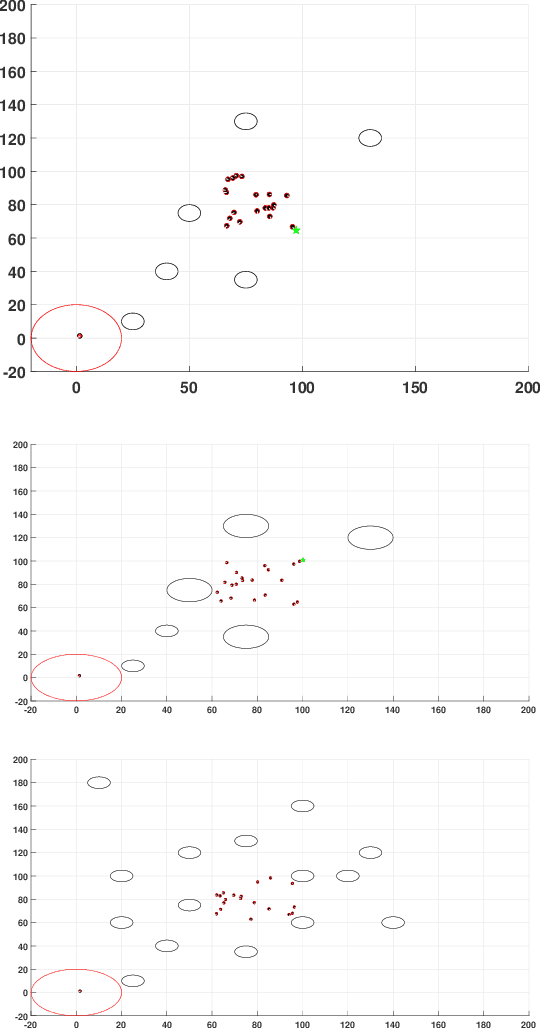
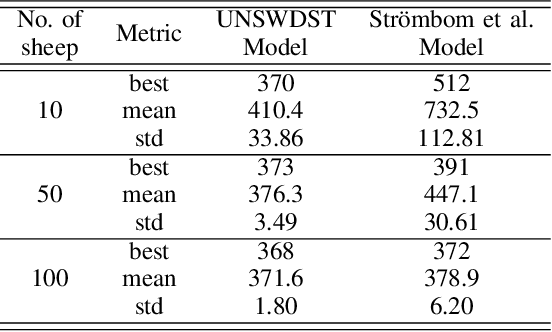
Shepherding involves herding a swarm of agents (\emph{sheep}) by another a control agent (\emph{sheepdog}) towards a goal. Multiple approaches have been documented in the literature to model this behaviour. In this paper, we present a modification to a well-known shepherding approach, and show, via simulation, that this modification improves shepherding efficacy. We then argue that given complexity arising from obstacles laden environments, path planning approaches could further enhance this model. To validate this hypothesis, we present a 2-stage evolutionary-based path planning algorithm for shepherding a swarm of agents in 2D environments. In the first stage, the algorithm attempts to find the best path for the sheepdog to move from its initial location to a strategic driving location behind the sheep. In the second stage, it calculates and optimises a path for the sheep. It does so by using \emph{way points} on that path as the sequential sub-goals for the sheepdog to aim towards. The proposed algorithm is evaluated in obstacle laden environments via simulation with further improvements achieved.