 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning-assisted autonomous swarm shepherding with collision avoidance
Paper and Code
Jan 25, 2023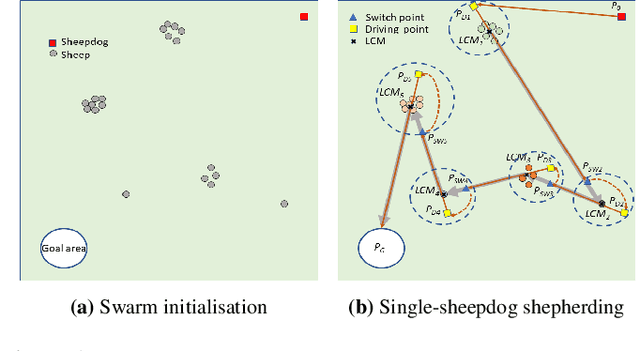
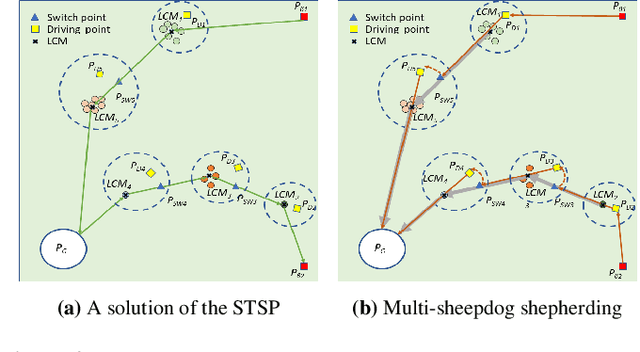
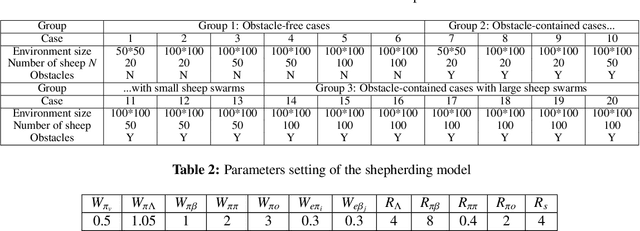
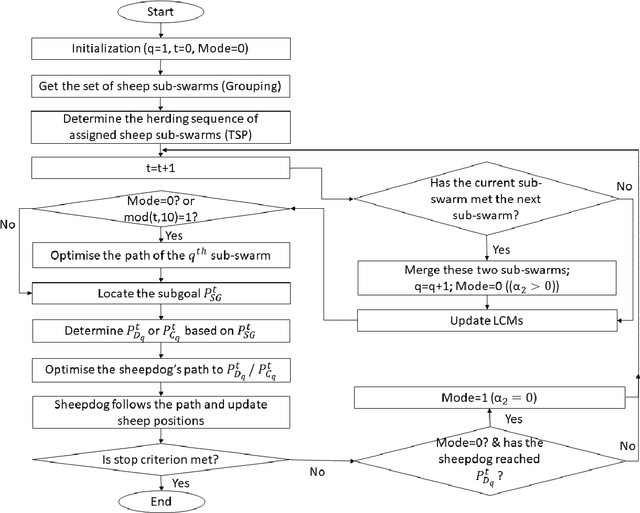
Robotic shepherding is a bio-inspired approach to autonomously guiding a swarm of agents towards a desired location and has earned increasing research interest recently. However, shepherding a highly dispersed swarm in an obstructive environment remains challenging for the existing methods. To improve the shepherding efficacy in complex environments with obstacles and dispersed sheep, this paper proposes a planning-assisted autonomous shepherding framework with collision avoidance. The proposed approach transforms the swarm shepherding problem into a single Travelling Salesman Problem (TSP), with the sheepdog moving mode classified into non-interaction and interaction mode. Additionally, an adaptive switching approach is integrated into the framework to guide real-time path planning for avoiding collisions with obstacles and sometimes with sheep swarm. Then the overarching hierarchical mission planning system is presented, which consists of a grouping approach to obtain sheep sub-swarms, a general TSP solver for determining the optimal push sequence of sub-swarms, and an online path planner for calculating optimal paths for both sheepdogs and sheep. The experiments on a range of environments, both with and without obstacles, quantitatively demonstrate the effectiveness of the proposed shepherding framework and planning approaches.