 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan vectors read minds better than experts? Comparing data augmentation strategies for the automated scoring of children's mindreading ability
Jun 03, 2021



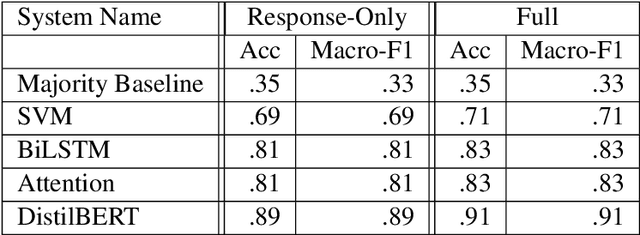
In this paper we implement and compare 7 different data augmentation strategies for the task of automatic scoring of children's ability to understand others' thoughts, feelings, and desires (or "mindreading"). We recruit in-domain experts to re-annotate augmented samples and determine to what extent each strategy preserves the original rating. We also carry out multiple experiments to measure how much each augmentation strategy improves the performance of automatic scoring systems. To determine the capabilities of automatic systems to generalize to unseen data, we create UK-MIND-20 - a new corpus of children's performance on tests of mindreading, consisting of 10,320 question-answer pairs. We obtain a new state-of-the-art performance on the MIND-CA corpus, improving macro-F1-score by 6 points. Results indicate that both the number of training examples and the quality of the augmentation strategies affect the performance of the systems. The task-specific augmentations generally outperform task-agnostic augmentations. Automatic augmentations based on vectors (GloVe, FastText) perform the worst. We find that systems trained on MIND-CA generalize well to UK-MIND-20. We demonstrate that data augmentation strategies also improve the performance on unseen data.
"What is on your mind?" Automated Scoring of Mindreading in Childhood and Early Adolescence
Nov 16, 2020


In this paper we present the first work on the automated scoring of mindreading ability in middle childhood and early adolescence. We create MIND-CA, a new corpus of 11,311 question-answer pairs in English from 1,066 children aged 7 to 14. We perform machine learning experiments and carry out extensive quantitative and qualitative evaluation. We obtain promising results, demonstrating the applicability of state-of-the-art NLP solutions to a new domain and task.
Robotic Hierarchical Graph Neurons. A novel implementation of HGN for swarm robotic behaviour control
Oct 28, 2019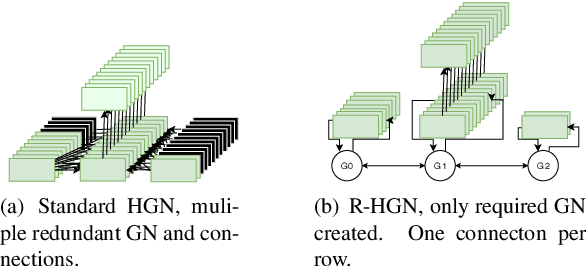
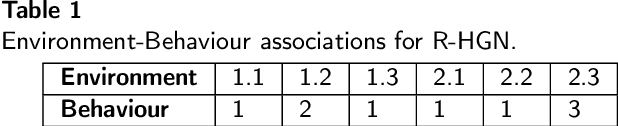

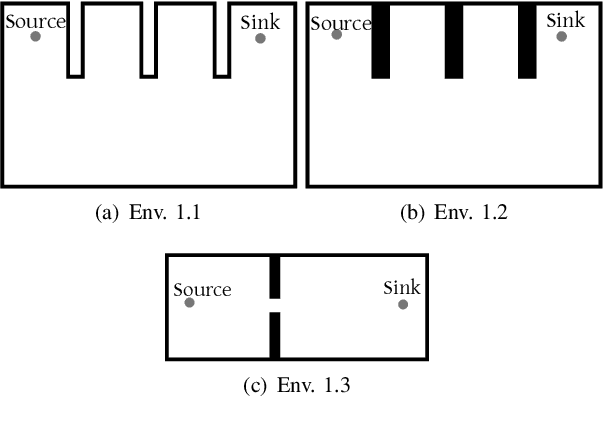
This paper explores the use of a novel form of Hierarchical Graph Neurons (HGN) for in-operation behaviour selection in a swarm of robotic agents. This new HGN is called Robotic-HGN (R-HGN), as it matches robot environment observations to environment labels via fusion of match probabilities from both temporal and intra-swarm collections. This approach is novel for HGN as it addresses robotic observations being pseudo-continuous numbers, rather than categorical values. Additionally, the proposed approach is memory and computation-power conservative and thus is acceptable for use in mobile devices such as single-board computers, which are often used in mobile robotic agents. This R-HGN approach is validated against individual behaviour implementation and random behaviour selection. This contrast is made in two sets of simulated environments: environments designed to challenge the held behaviours of the R-HGN, and randomly generated environments which are more challenging for the robotic swarm than R-HGN training conditions. R-HGN has been found to enable appropriate behaviour selection in both these sets, allowing significant swarm performance in pre-trained and unexpected environment conditions.
Swarm Behaviour Evolution via Rule Sharing and Novelty Search
Oct 28, 2019



We present in this paper an exertion of our previous work by increasing the robustness and coverage of the evolution search via hybridisation with a state-of-the-art novelty search and accelerate the individual agent behaviour searches via a novel behaviour-component sharing technique. Via these improvements, we present Swarm Learning Classifier System 2.0 (SLCS2), a behaviour evolving algorithm which is robust to complex environments, and seen to out-perform a human behaviour designer in challenging cases of the data-transfer task in a range of environmental conditions. Additionally, we examine the impact of tailoring the SLCS2 rule generator for specific environmental conditions. We find this leads to over-fitting, as might be expected, and thus conclude that for greatest environment flexibility a general rule generator should be utilised.