 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Hierarchical Graph Neurons. A novel implementation of HGN for swarm robotic behaviour control
Oct 28, 2019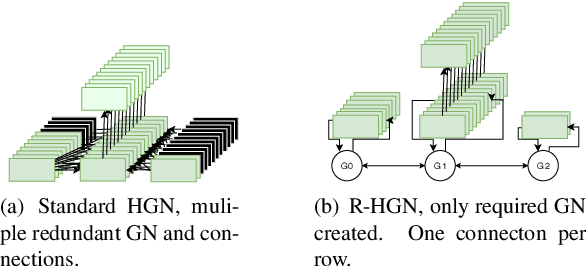

This paper explores the use of a novel form of Hierarchical Graph Neurons (HGN) for in-operation behaviour selection in a swarm of robotic agents. This new HGN is called Robotic-HGN (R-HGN), as it matches robot environment observations to environment labels via fusion of match probabilities from both temporal and intra-swarm collections. This approach is novel for HGN as it addresses robotic observations being pseudo-continuous numbers, rather than categorical values. Additionally, the proposed approach is memory and computation-power conservative and thus is acceptable for use in mobile devices such as single-board computers, which are often used in mobile robotic agents. This R-HGN approach is validated against individual behaviour implementation and random behaviour selection. This contrast is made in two sets of simulated environments: environments designed to challenge the held behaviours of the R-HGN, and randomly generated environments which are more challenging for the robotic swarm than R-HGN training conditions. R-HGN has been found to enable appropriate behaviour selection in both these sets, allowing significant swarm performance in pre-trained and unexpected environment conditions.