 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralizable Single-Source Cross-modality Medical Image Segmentation via Invariant Causal Mechanisms
Nov 07, 2024Single-source domain generalization (SDG) aims to learn a model from a single source domain that can generalize well on unseen target domains. This is an important task in computer vision, particularly relevant to medical imaging where domain shifts are common. In this work, we consider a challenging yet practical setting: SDG for cross-modality medical image segmentation. We combine causality-inspired theoretical insights on learning domain-invariant representations with recent advancements in diffusion-based augmentation to improve generalization across diverse imaging modalities. Guided by the ``intervention-augmentation equivariant'' principle, we use controlled diffusion models (DMs) to simulate diverse imaging styles while preserving the content, leveraging rich generative priors in large-scale pretrained DMs to comprehensively perturb the multidimensional style variable. Extensive experiments on challenging cross-modality segmentation tasks demonstrate that our approach consistently outperforms state-of-the-art SDG methods across three distinct anatomies and imaging modalities. The source code is available at \href{https://github.com/ratschlab/ICMSeg}{https://github.com/ratschlab/ICMSeg}.
Uncertainty modeling for fine-tuned implicit functions
Jun 17, 2024



Implicit functions such as Neural Radiance Fields (NeRFs), occupancy networks, and signed distance functions (SDFs) have become pivotal in computer vision for reconstructing detailed object shapes from sparse views. Achieving optimal performance with these models can be challenging due to the extreme sparsity of inputs and distribution shifts induced by data corruptions. To this end, large, noise-free synthetic datasets can serve as shape priors to help models fill in gaps, but the resulting reconstructions must be approached with caution. Uncertainty estimation is crucial for assessing the quality of these reconstructions, particularly in identifying areas where the model is uncertain about the parts it has inferred from the prior. In this paper, we introduce Dropsembles, a novel method for uncertainty estimation in tuned implicit functions. We demonstrate the efficacy of our approach through a series of experiments, starting with toy examples and progressing to a real-world scenario. Specifically, we train a Convolutional Occupancy Network on synthetic anatomical data and test it on low-resolution MRI segmentations of the lumbar spine. Our results show that Dropsembles achieve the accuracy and calibration levels of deep ensembles but with significantly less computational cost.
Automatic breach detection during spine pedicle drilling based on vibroacoustic sensing
Mar 27, 2023



Pedicle drilling is a complex and critical spinal surgery task. Detecting breach or penetration of the surgical tool to the cortical wall during pilot-hole drilling is essential to avoid damage to vital anatomical structures adjacent to the pedicle, such as the spinal cord, blood vessels, and nerves. Currently, the guidance of pedicle drilling is done using image-guided methods that are radiation intensive and limited to the preoperative information. This work proposes a new radiation-free breach detection algorithm leveraging a non-visual sensor setup in combination with deep learning approach. Multiple vibroacoustic sensors, such as a contact microphone, a free-field microphone, a tri-axial accelerometer, a uni-axial accelerometer, and an optical tracking system were integrated into the setup. Data were collected on four cadaveric human spines, ranging from L5 to T10. An experienced spine surgeon drilled the pedicles relying on optical navigation. A new automatic labeling method based on the tracking data was introduced. Labeled data was subsequently fed to the network in mel-spectrograms, classifying the data into breach and non-breach. Different sensor types, sensor positioning, and their combinations were evaluated. The best results in breach recall for individual sensors could be achieved using contact microphones attached to the dorsal skin (85.8\%) and uni-axial accelerometers clamped to the spinous process of the drilled vertebra (81.0\%). The best-performing data fusion model combined the latter two sensors with a breach recall of 98\%. The proposed method shows the great potential of non-visual sensor fusion for avoiding screw misplacement and accidental bone breaches during pedicle drilling and could be extended to further surgical applications.
Registration made easy -- standalone orthopedic navigation with HoloLens
Jan 17, 2020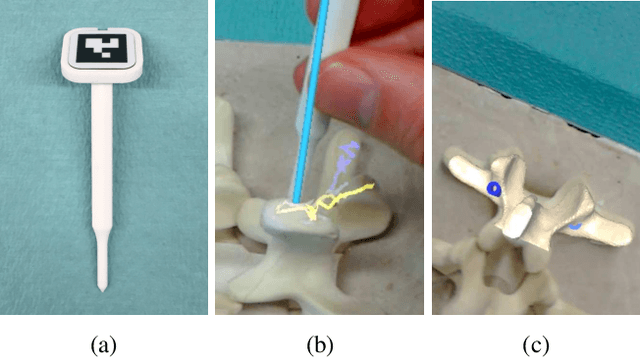
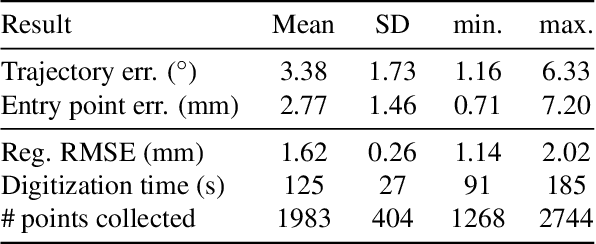
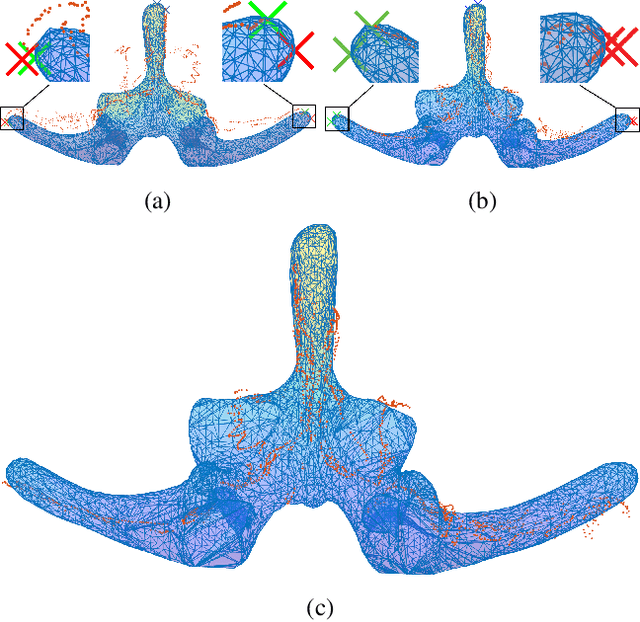
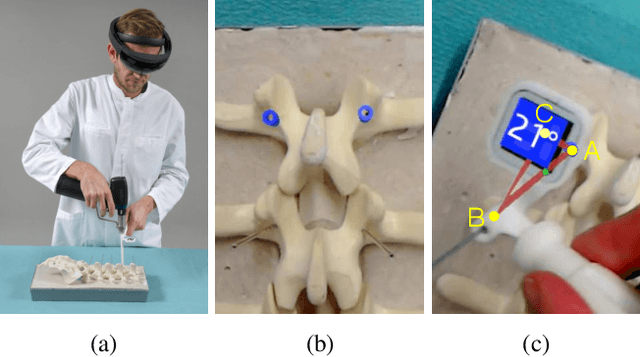
In surgical navigation, finding correspondence between preoperative plan and intraoperative anatomy, the so-called registration task, is imperative. One promising approach is to intraoperatively digitize anatomy and register it with the preoperative plan. State-of-the-art commercial navigation systems implement such approaches for pedicle screw placement in spinal fusion surgery. Although these systems improve surgical accuracy, they are not gold standard in clinical practice. Besides economical reasons, this may be due to their difficult integration into clinical workflows and unintuitive navigation feedback. Augmented Reality has the potential to overcome these limitations. Consequently, we propose a surgical navigation approach comprising intraoperative surface digitization for registration and intuitive holographic navigation for pedicle screw placement that runs entirely on the Microsoft HoloLens. Preliminary results from phantom experiments suggest that the method may meet clinical accuracy requirements.