 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSonification as a Reliable Alternative to Conventional Visual Surgical Navigation
Jun 30, 2022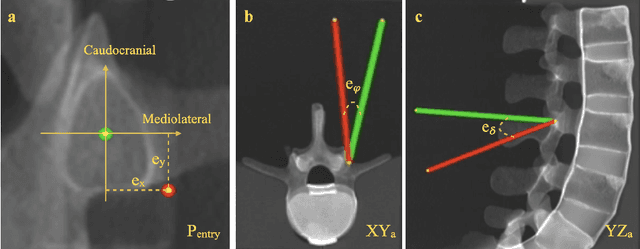
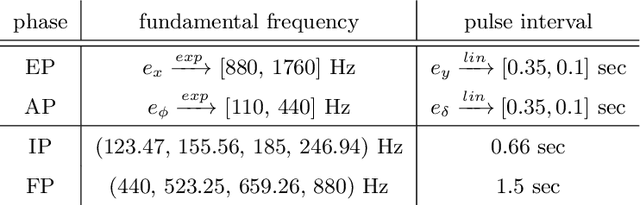
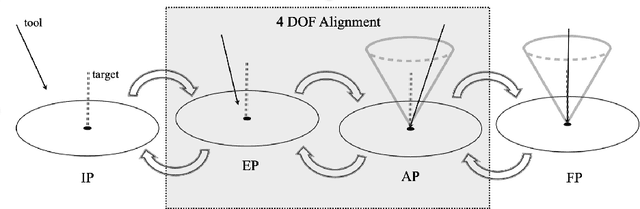
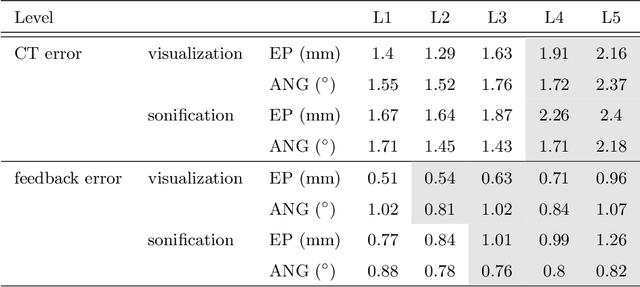
Despite the undeniable advantages of image-guided surgical assistance systems in terms of accuracy, such systems have not yet fully met surgeons' needs or expectations regarding usability, time efficiency, and their integration into the surgical workflow. On the other hand, perceptual studies have shown that presenting independent but causally correlated information via multimodal feedback involving different sensory modalities can improve task performance. This article investigates an alternative method for computer-assisted surgical navigation, introduces a novel sonification methodology for navigated pedicle screw placement, and discusses advanced solutions based on multisensory feedback. The proposed method comprises a novel sonification solution for alignment tasks in four degrees of freedom based on frequency modulation (FM) synthesis. We compared the resulting accuracy and execution time of the proposed sonification method with visual navigation, which is currently considered the state of the art. We conducted a phantom study in which 17 surgeons executed the pedicle screw placement task in the lumbar spine, guided by either the proposed sonification-based or the traditional visual navigation method. The results demonstrated that the proposed method is as accurate as the state of the art while decreasing the surgeon's need to focus on visual navigation displays instead of the natural focus on surgical tools and targeted anatomy during task execution.
Registration made easy -- standalone orthopedic navigation with HoloLens
Jan 17, 2020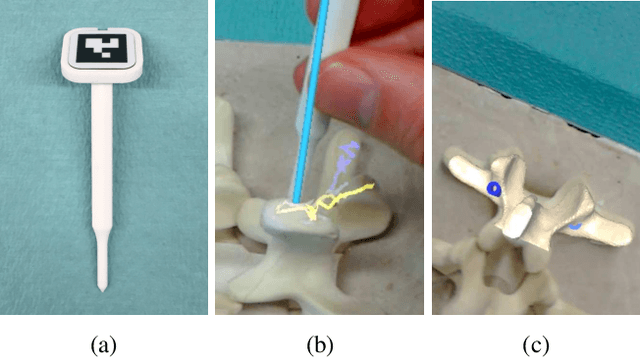
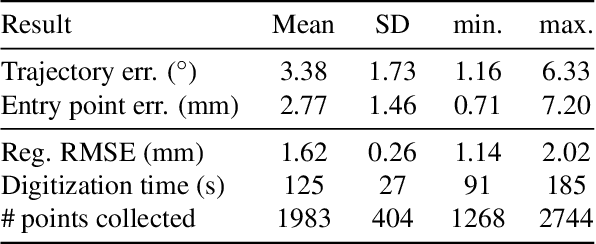
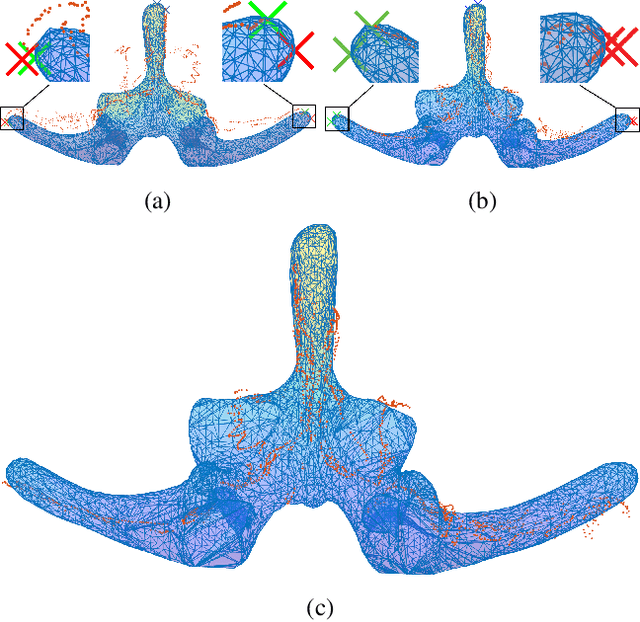
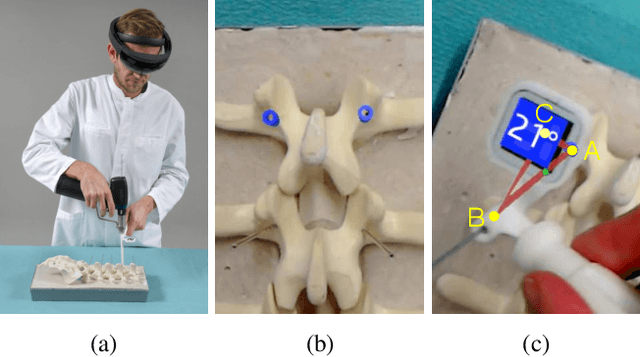
In surgical navigation, finding correspondence between preoperative plan and intraoperative anatomy, the so-called registration task, is imperative. One promising approach is to intraoperatively digitize anatomy and register it with the preoperative plan. State-of-the-art commercial navigation systems implement such approaches for pedicle screw placement in spinal fusion surgery. Although these systems improve surgical accuracy, they are not gold standard in clinical practice. Besides economical reasons, this may be due to their difficult integration into clinical workflows and unintuitive navigation feedback. Augmented Reality has the potential to overcome these limitations. Consequently, we propose a surgical navigation approach comprising intraoperative surface digitization for registration and intuitive holographic navigation for pedicle screw placement that runs entirely on the Microsoft HoloLens. Preliminary results from phantom experiments suggest that the method may meet clinical accuracy requirements.