 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlignist: CAD-Informed Orientation Distribution Estimation by Fusing Shape and Correspondences
Sep 10, 2024
Object pose distribution estimation is crucial in robotics for better path planning and handling of symmetric objects. Recent distribution estimation approaches employ contrastive learning-based approaches by maximizing the likelihood of a single pose estimate in the absence of a CAD model. We propose a pose distribution estimation method leveraging symmetry respecting correspondence distributions and shape information obtained using a CAD model. Contrastive learning-based approaches require an exhaustive amount of training images from different viewpoints to learn the distribution properly, which is not possible in realistic scenarios. Instead, we propose a pipeline that can leverage correspondence distributions and shape information from the CAD model, which are later used to learn pose distributions. Besides, having access to pose distribution based on correspondences before learning pose distributions conditioned on images, can help formulate the loss between distributions. The prior knowledge of distribution also helps the network to focus on getting sharper modes instead. With the CAD prior, our approach converges much faster and learns distribution better by focusing on learning sharper distribution near all the valid modes, unlike contrastive approaches, which focus on a single mode at a time. We achieve benchmark results on SYMSOL-I and T-Less datasets.
Fixture calibration with guaranteed bounds from a few correspondence-free surface points
Mar 04, 2024Calibration of fixtures in robotic work cells is essential but also time consuming and error-prone, and poor calibration can easily lead to wasted debugging time in downstream tasks. Contact-based calibration methods let the user measure points on the fixture's surface with a tool tip attached to the robot's end effector. Most such methods require the user to manually annotate correspondences on the CAD model, however, this is error-prone and a cumbersome user experience. We propose a correspondence-free alternative: The user simply measures a few points from the fixture's surface, and our method provides a tight superset of the poses which could explain the measured points. This naturally detects ambiguities related to symmetry and uninformative points and conveys this uncertainty to the user. Perhaps more importantly, it provides guaranteed bounds on the pose. The computation of such bounds is made tractable by the use of a hierarchical grid on SE(3). Our method is evaluated both in simulation and on a real collaborative robot, showing great potential for easier and less error-prone fixture calibration. Project page at https://sites.google.com/view/ttpose
SpyroPose: Importance Sampling Pyramids for Object Pose Distribution Estimation in SE(3)
Mar 09, 2023Object pose estimation is a core computer vision problem and often an essential component in robotics. Pose estimation is usually approached by seeking the single best estimate of an object's pose, but this approach is ill-suited for tasks involving visual ambiguity. In such cases it is desirable to estimate the uncertainty as a pose distribution to allow downstream tasks to make informed decisions. Pose distributions can have arbitrary complexity which motivates estimating unparameterized distributions, however, until now they have only been used for orientation estimation on SO(3) due to the difficulty in training on and normalizing over SE(3). We propose a novel method for pose distribution estimation on SE(3). We use a hierarchical grid, a pyramid, which enables efficient importance sampling during training and sparse evaluation of the pyramid at inference, allowing real time 6D pose distribution estimation. Our method outperforms state-of-the-art methods on SO(3), and to the best of our knowledge, we provide the first quantitative results on pose distribution estimation on SE(3). Code will be available at spyropose.github.io
Multi-view object pose estimation from correspondence distributions and epipolar geometry
Oct 03, 2022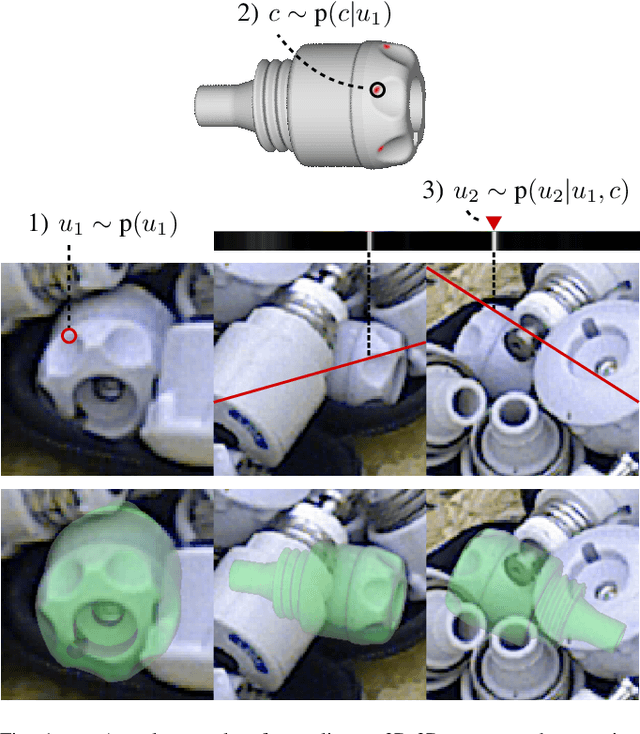
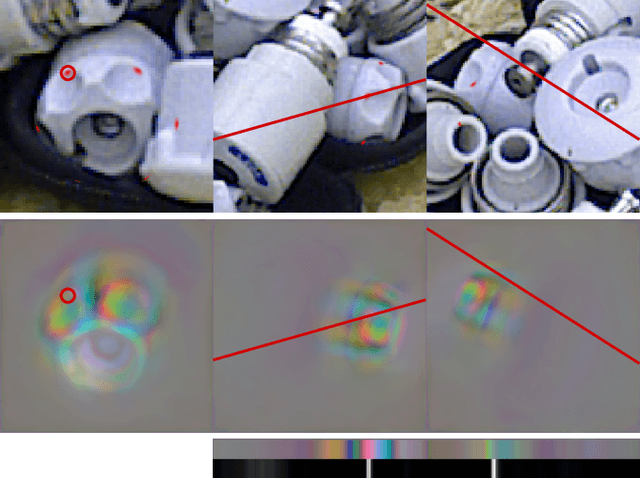
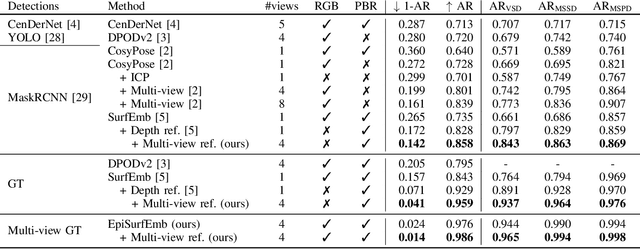
In many automation tasks involving manipulation of rigid objects, the poses of the objects must be acquired. Vision-based pose estimation using a single RGB or RGB-D sensor is especially popular due to its broad applicability. However, single-view pose estimation is inherently limited by depth ambiguity and ambiguities imposed by various phenomena like occlusion, self-occlusion, reflections, etc. Aggregation of information from multiple views can potentially resolve these ambiguities, but the current state-of-the-art multi-view pose estimation method only uses multiple views to aggregate single-view pose estimates, and thus rely on obtaining good single-view estimates. We present a multi-view pose estimation method which aggregates learned 2D-3D distributions from multiple views for both the initial estimate and optional refinement. Our method performs probabilistic sampling of 3D-3D correspondences under epipolar constraints using learned 2D-3D correspondence distributions which are implicitly trained to respect visual ambiguities such as symmetry. Evaluation on the T-LESS dataset shows that our method reduces pose estimation errors by 80-91% compared to the best single-view method, and we present state-of-the-art results on T-LESS with four views, even compared with methods using five and eight views.
Ki-Pode: Keypoint-based Implicit Pose Distribution Estimation of Rigid Objects
Sep 20, 2022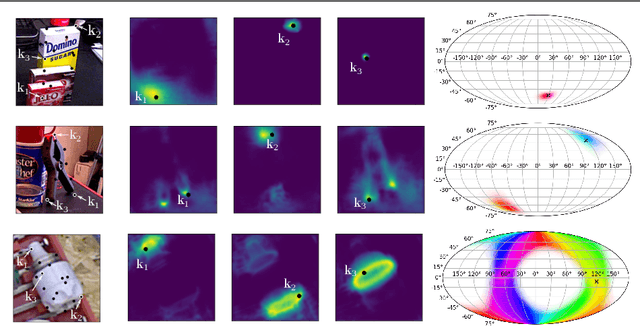
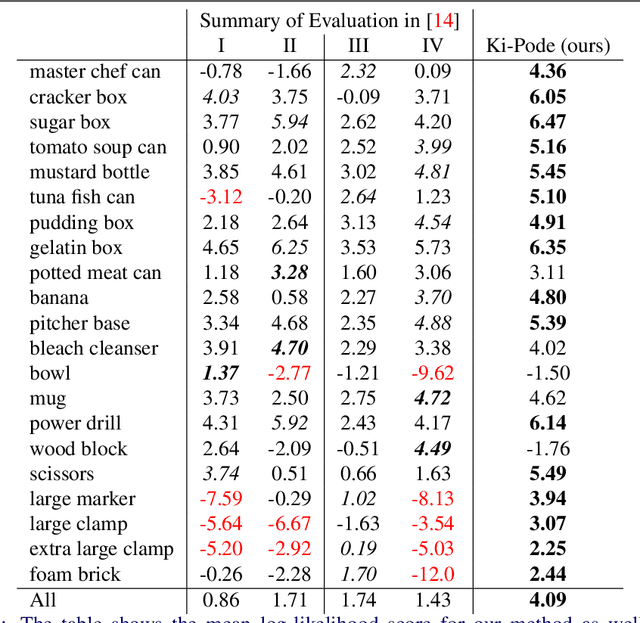

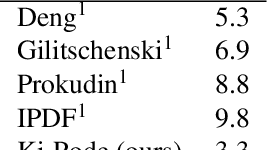
The estimation of 6D poses of rigid objects is a fundamental problem in computer vision. Traditionally pose estimation is concerned with the determination of a single best estimate. However, a single estimate is unable to express visual ambiguity, which in many cases is unavoidable due to object symmetries or occlusion of identifying features. Inability to account for ambiguities in pose can lead to failure in subsequent methods, which is unacceptable when the cost of failure is high. Estimates of full pose distributions are, contrary to single estimates, well suited for expressing uncertainty on pose. Motivated by this, we propose a novel pose distribution estimation method. An implicit formulation of the probability distribution over object pose is derived from an intermediary representation of an object as a set of keypoints. This ensures that the pose distribution estimates have a high level of interpretability. Furthermore, our method is based on conservative approximations, which leads to reliable estimates. The method has been evaluated on the task of rotation distribution estimation on the YCB-V and T-LESS datasets and performs reliably on all objects.
Self-supervised deep visual servoing for high precision peg-in-hole insertion
Jun 17, 2022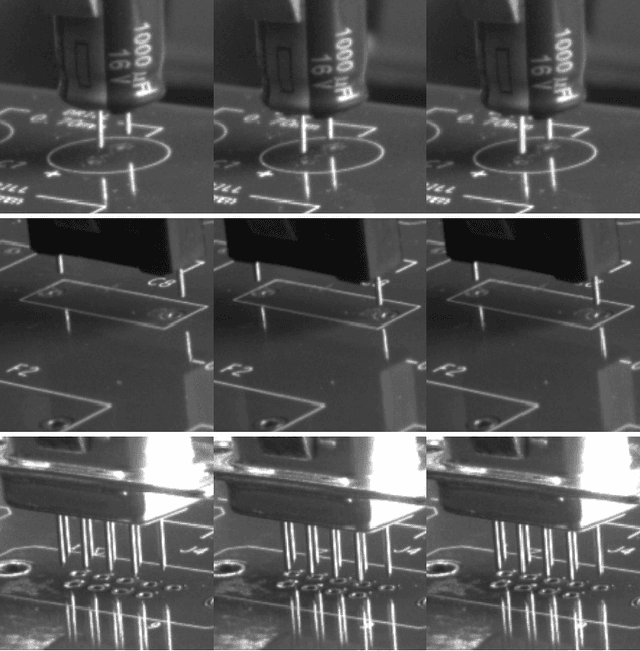

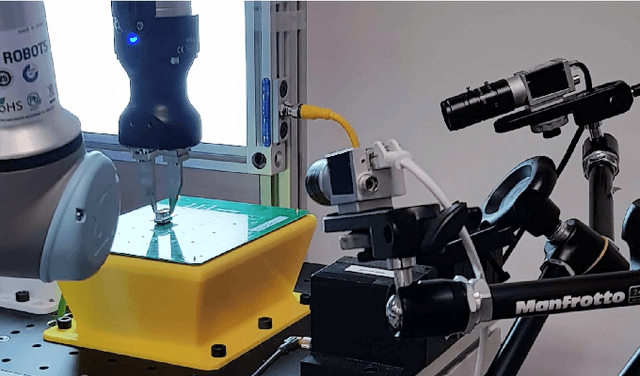
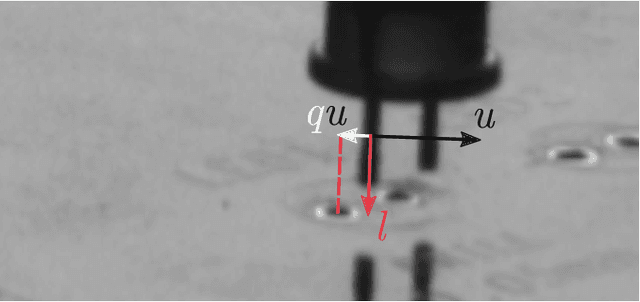
Many industrial assembly tasks involve peg-in-hole like insertions with sub-millimeter tolerances which are challenging, even in highly calibrated robot cells. Visual servoing can be employed to increase the robustness towards uncertainties in the system, however, state of the art methods either rely on accurate 3D models for synthetic renderings or manual involvement in acquisition of training data. We present a novel self-supervised visual servoing method for high precision peg-in-hole insertion, which is fully automated and does not rely on synthetic data. We demonstrate its applicability for insertion of electronic components into a printed circuit board with tight tolerances. We show that peg-in-hole insertion can be drastically sped up by preceding a robust but slow force-based insertion strategy with our proposed visual servoing method, the configuration of which is fully autonomous.
A Flexible and Robust Vision Trap for Automated Part Feeder Design
Jun 01, 2022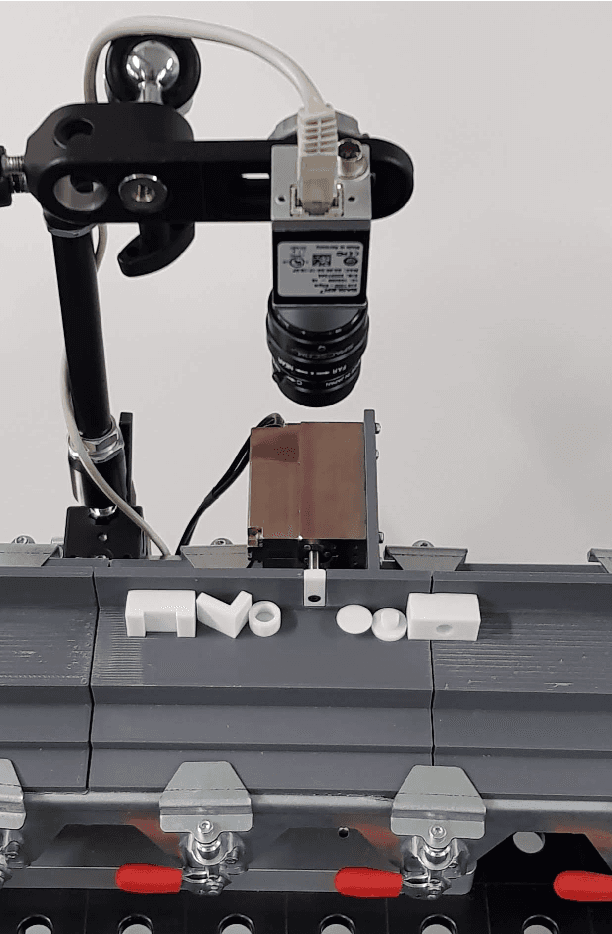
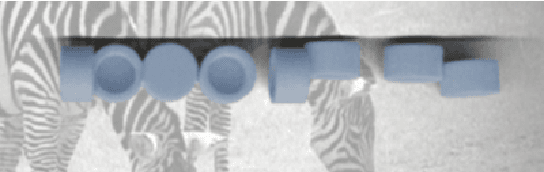


Fast, robust, and flexible part feeding is essential for enabling automation of low volume, high variance assembly tasks. An actuated vision-based solution on a traditional vibratory feeder, referred to here as a vision trap, should in principle be able to meet these demands for a wide range of parts. However, in practice, the flexibility of such a trap is limited as an expert is needed to both identify manageable tasks and to configure the vision system. We propose a novel approach to vision trap design in which the identification of manageable tasks is automatic and the configuration of these tasks can be delegated to an automated feeder design system. We show that the trap's capabilities can be formalized in such a way that it integrates seamlessly into the ecosystem of automated feeder design. Our results on six canonical parts show great promise for autonomous configuration of feeder systems.
SurfEmb: Dense and Continuous Correspondence Distributions for Object Pose Estimation with Learnt Surface Embeddings
Nov 26, 2021



We present an approach to learn dense, continuous 2D-3D correspondence distributions over the surface of objects from data with no prior knowledge of visual ambiguities like symmetry. We also present a new method for 6D pose estimation of rigid objects using the learnt distributions to sample, score and refine pose hypotheses. The correspondence distributions are learnt with a contrastive loss, represented in object-specific latent spaces by an encoder-decoder query model and a small fully connected key model. Our method is unsupervised with respect to visual ambiguities, yet we show that the query- and key models learn to represent accurate multi-modal surface distributions. Our pose estimation method improves the state-of-the-art significantly on the comprehensive BOP Challenge, trained purely on synthetic data, even compared with methods trained on real data. The project site is at https://surfemb.github.io/ .
Fast robust peg-in-hole insertion with continuous visual servoing
Nov 12, 2020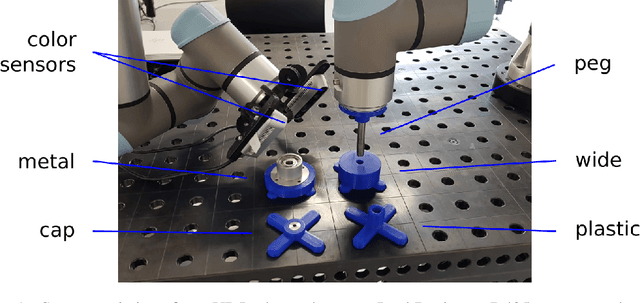
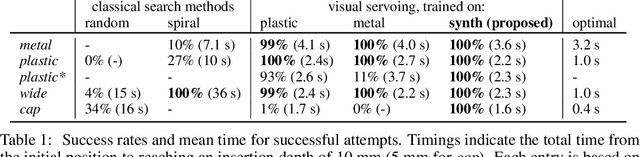
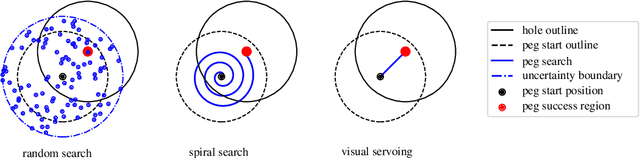

This paper demonstrates a visual servoing method which is robust towards uncertainties related to system calibration and grasping, while significantly reducing the peg-in-hole time compared to classical methods and recent attempts based on deep learning. The proposed visual servoing method is based on peg and hole point estimates from a deep neural network in a multi-cam setup, where the model is trained on purely synthetic data. Empirical results show that the learnt model generalizes to the real world, allowing for higher success rates and lower cycle times than existing approaches.